|
|
Модальный анализ динамических свойств энергосистемыОсновные определения и вывод основных уравнений
Модальный анализустойчивости требует приведения модели энергосистемы к нормальному виду, т.е. все линеаризованные дифференциальные уравнения должны быть разрешены относительно производных по времени
где
R – квадратная матрица состояния системы, размером
Таким образом, для системы порядка n модель имеет вид
Система линейных уравнений малых колебаний для сложной энергосистемы
записанная в матричной форме
представляет собой модель, содержащую вторые производные переменных состояния по времени (в данном случае углов отклонения роторов от синхронной оси). На примере одногенератороной системы можно рассмотреть приведение математической модели
к нормальному виду. Поскольку первая производная угла отклонения по времени является угловой скоростью
следовательно
откуда
Полученная модель приведена к форме, содержащей только первые производные по времени, за счет введения дополнительных переменных состояния и удвоения ранга матрицы состояния энергосистемы. Решение системы для любой переменной состояния может быть записано в виде суммы составляющих движения
где
где
Таким образом, переменная состояния определяется из выражения
Выражение для определения всей совокупности переменных состояния можно записать в виде системы уравнений
или в матричной форме
Слагаемые правой части уравнения называется модами движения, а входящие в них столбцы – модальными векторами. Пусть число генерирующих узлов n=2, переменные состояния В данном примере для двухгенераторной электроэнергетической системы
Переменная состояния Угол отклонения ротора первого генератора от синхронной оси определяется по формуле
где
Рис. 45. Зависимость переменной состояния от времени
Для рассматриваемого примера состояние системы устойчиво т.к. суперпозиция колебаний обоих частот имеет тенденцию к затуханию (см. рис. 45). В общем случае выражение для столбца переменных состояния может быть записано через квадратную модальную матрицу, столбцами которой являются модальные вектора
Поскольку производная от экспоненты
следовательно, для левой части уравнения модели приведенной к нормальному виду
верно выражение
или же
Для правой части в свою очередь верно выражение
Таким образом, для каждого
что при сокращении сомножителей
Таким образом, полученное матричное уравнение не зависит от начальных условий и определяется только параметрами системы. Из матричной алгебры известно, что если для некого числа
где Собственные значения определяются из условия
Раскрытие характеристического определителя
дает характеристическое уравнение
решение которого позволяет найти все собственные значения. Матрица Собственные вектора определяются из уравнений
где
в которое поочередно подставляются все собственные значения. Каждое собственное значение соответствует определенному собственному вектору матрицы
Собственное значение может быть действительным корнем Собственный вектор определяет соотношение амплитуд колебаний роторов генераторов с частотой
Модальная матрица определяет совокупность всех мод движения. На рис. 46 показан временной срез моды – форма колебательного движения с частотой
Рис. 46. Форма (мода) j-го движения
Рис. 47. Схема энергосистемы
Модальная теория изучает совокупность динамических свойств энергосистемы, на основании определения собственных значений и собственных векторов матрицы состояний энергосистемы. Для определения собственного вектора необходимо решить следующую систему
Однако, т.к.
Пусть математическая модель представлена системой уравнений второго порядка
которая при записи в матричной форме имеет вид
где элементами столбцов являются переменные состояния, квадратная матрица – матрица состояния Собственные значения
которое для данного примера имеет вид
Решение характеристического уравнения, полученного при раскрытии определителя, позволяет найти собственные значения
Для определения собственных векторов найденные собственные значения поочередно подставляются в систему уравнений
При подстановке первого собственного значения
то есть имеет место система линейно зависимых уравнений
В таком случае один из компонентов собственного вектора задается произвольно, например
тогда
Следовательно, первый собственный вектор
При подстановке второго собственного значения
При аналогичном задании одного из компонентов (
В таком случае решение для переменных состояния
Пусть переменные состояния – углы отклонения роторов от синхронной оси в энергосистеме с двумя генераторными узлами
Изменение во времени углов отклонения роторов генераторов от синхронной оси показаны на рис. 48. Наличие положительного действительного корня, как показано на рисунке, ведет к неограниченному росту углов отклонения, т.е. к апериодическому нарушению статической устойчивости.
Рис. 48. Зависимости углов отклонения роторов генераторов от синхронной оси
Этапы модального анализа динамических свойств сложных энергосистем Динамические свойства энергосистемы определяются следующими параметрами: 1) частота электромеханических колебаний (ЭМК) ротора генератора 2) коэффициент затухания – 3) соотношение амплитуд колебаний роторов генераторов на частоте
Модальный анализ включает следующие этапы: 1. приведение математической модели энергосистемы к виду
2. вычисление собственных значений и собственных векторов матрицы энергосистемы
3. выделение мод электромеханических колебаний, т.е. выделение из всей совокупности вычисленных собственных значений 4. выделение из полной модальной матрицы подматрицы собственных векторов соответствующих модам электромеханических колебаний
и выделение из указанных векторов элементов соответствующих углам отклонения роторов
что дает выделенную подматрицу размером 5. нормирование собственного вектора путем определения максимального по модулю элемента, на который делятся все остальные
Анализ мод электромеханических колебаний (ЭМК) Существуют следующие виды мод ЭМК: · Системные, · Подсистемные, · Локальные. Вышеуказанные Иерархия мод определяется двумя признаками собственного вектора:
Для отличия системных мод от локальных используются различия по модулю компонент собственного вектора. Если модули всех элементов собственного вектора лежат в диапазоне Для отличия системных мод от подсистемных используются различия по фазе собственного вектора. Пусть имеется энергосистема, содержащая шесть генераторных узлов и такое же количество синхронных машин (см. рис. 49). Собственные значения и собственные вектора матрицы состояния данной энергосистемы приведены в табл. 2.
Рис. 49. Схема электрической сети, содержащей генераторные узлы Табл. 2. Собственные значения и собственные вектора матрицы состояния энергосистемы приведенной на рис. 48.
Поскольку вещественные части всех собственных значений в рассматриваемом примере отрицательны, система является статически устойчивой. Первая мода, соответствующая частоте
Рис. 50. Элементы собственного вектора системной моды
Вторая мода, соответствующая частоте
по признакам фаз элементов собственного вектора данная мода также разбивается на две подсистемные. Третья мода, соответствующая частоте
Аналогично производится анализ остальных мод ЭМК. Следующим этапом является проверка качества демпфирования. Демпфирование на частоте j-го ЭМК является удовлетворительным, если Первая мода вследствие ее низкочастотности проявляется во всей системе, но больше всего в режимных параметрах первого генератора, для которого ее частота является частотой собственных колебаний. Для получения удовлетворительного демпфирования необходимо повысить декремент затухания на системной частоте, т.е. подобрать настройки первого генератора таким образом, чтобы демпфировалась частота первой моды. Каждой моде j-й электромеханических колебаний соответствует пара комплексно сопряженных собственных значений матрицы состояния энергосистемы
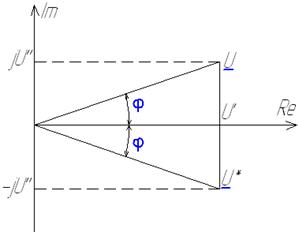
Паре комплексно сопряженных собственных значений в свою очередь соответствует пара комплексно сопряженных собственных векторов (см. рис. 51)
Рис. 51. Пара комплексно сопряженных собственных векторов
Как было показано выше решение для переменной состояния (в данном случае угла отклонения) записывается в виде
Каждому слагаемому этой суммы соответствует пара комплексно сопряженных собственных значений и пара комплексно сопряженных собственных векторов
Если записать данное выражение через показательные степени
и вынести общие сомножители за скобки
то полученное уравнение соответствует уравнению гармонических колебаний
Для рассматриваемого примера (см. табл. 2) угол отклонения ротора первого генератора можно также записать как сумму, каждое слагаемое которой соответствует частоте одной из мод ЭМК
Амплитуды трех последних мод на два порядка меньше системной, их демпфирование удовлетворительно, поэтому ими можно пренебречь. Периоды ЭМК первой и второй мод соответственно
Декремент затухания первой моды α= –0,03 (что означает уменьшение амплитуды в e раз за 30 с, т.е. за 20 периодов), амплитуда колебаний с частотой первой моды для ротора первого генератора U11=1, фаза φ11=0. Декремент затухания второй моды α= –0,25 (что означает уменьшение амплитуды в e раз за 4 с, т.е. за 5 периодов), амплитуда колебаний с частотой второй моды для ротора первого генератора U12=0,1, фаза φ12=174°. ЭМК первой и второй мод для первого генератора рассматриваемого примера и их результирующая кривая показаны на рис. 52.
Рис. 52. Временная зависимость угла отклонения ротора генератора от синхронной оси Приведение математической модели энергосистемы к системе дифференциальных уравнений первого порядка
Приведение математической модели энергосистемы к данной форме необходимо для модального анализа устойчивости. Дифференциальные уравнения любого порядка
можно привести к дифференциальному уравнению первого порядка с помощью замен
в результате чего исходное уравнение приобретает вид
или же при введении оператора
Пусть энергосистема содержит три синхронных генератора, которые находятся, соответственно, в трех узлах электрической сети. Как показано в [9], в этом случае уравнения движения роторов генераторов имеют вид
и мощности генераторов определяются из выражений
Разложение уравнений движения роторов генераторов в ряд Тейлора без учета членов разложения, содержащих производные выше первой, дает систему уравнений
где
При введении обозначений
число уравнений в системе удваивается, но они содержат производные только первого порядка
Таким образом, система уравнений приведена к виду
или же
где элементы матрицы состояния рассматриваемой энергосистемы определяются из выражений
Методы определения собственных значений и собственных векторов матрицы состояния энергосистемы Указанные методы делятся на два основных класса: 1) Методы определяющие по одному собственному значению и одному собственному вектору в одном интервале цикле: a. Степенной метод; b. Метод обратной матрицы, 2) Методы определяющие весь спектр собственных векторов и собственных значений в одном интервале цикле: a. QR-алгоритм; b. QL-алгоритм. Степенной метод
Собственные значения
В начале первой итерации степенного метода произвольно задается начальное приближение первого собственного вектора
причем начальное приближение должно быть ненулевым
Затем определяется следующее приближение собственного вектора по формуле
Поскольку
следовательно
Для определения первого приближения собственного значения λ необходимо умножить обе части последнего уравнения на транспонированные столбцы начального приближения собственного вектора
откуда
Для степенного метода k-я итерация включает следующие этапы: 1. определение нового приближения собственного вектора
2. определение нового приближения собственного значения
3. проверка сходимости итерационного процесса
Таким образом, k-е приближение собственного вектора
откуда и название метода - степенной.
Степенной метод со сдвигом
Для определения второго собственного значения матрицы
причем В итерационном цикле вычисляются Для данного итерационного цикла каждый k-й шаг включает следующие этапы: 1) умножение матрицы
2) определение нового приближения собственного значения матрицы
3) Проверка сходимости
где 4) Определение k-го приближения собственного вектора
После того, как в результате данного итерационного цикла с заданной точностью находится собственное значение
Для определения третьего собственного значения матрицы
В результате итерационного цикла определяется
Таким образом, можно найти все или необходимое число собственных значений матрицы Пусть
а начальное приближение собственного вектора
Тогда первые приближения собственного вектора и собственного значения, вычисляемые в процессе первого итерационного шага
Второй итерационный шаг степенного метода для данного примера имеет вид
и включает проверку сходимости, условие которой в данном случае не выполняется
где 0,1 – заданное малое число, характеризующее точность расчета. Пусть на неком k-м шаге итерационный процесс сошелся с заданной точностью при значении Следующий итерационный цикл предваряется формированием матрицы
Первый шаг итерационного процесса включает задание начального приближения собственного вектора матрицы
умножение данного начального приближения на матрицу
определение первого приближения собственного значения
определение первого приближения собственного вектора
На второй итерации аналогично определяются следующие приближения собственного вектора и собственного значения
и производится проверка сходимости итерационного процесса
Хотя на второй итерации заданная точность расчета не достигнута, но поскольку, как было вычислено выше
можно утверждать, что собственное значение, вычисленное на третей итерации
и, следовательно на третьей итерации условие сходимости будет удовлетворено
Таким образом, в ходе второго итерационного цикла, включающего три шага, определяется собственное значение 12 |
|
 ,
, - вектор переменных состояний системы порядка n,
- вектор переменных состояний системы порядка n, ,
, .
.
 ,
,
 ,
, ,
, .
. ,
, – корень системы,
– корень системы, – амплитуда движения, включающая два сомножителя
– амплитуда движения, включающая два сомножителя ,
, – сомножитель, не зависящий от начальных условий и определяемый только параметрами системы,
– сомножитель, не зависящий от начальных условий и определяемый только параметрами системы, – сомножитель, зависящий от начальных условий.
– сомножитель, зависящий от начальных условий. .
.
 .
. – углы отклонения роторов генераторов от синхронной оси
– углы отклонения роторов генераторов от синхронной оси .
. – суперпозиция колебаний различной частоты ротора генератора при нарушении установившегося режима работы энергосистемы (см. рис. 45).
– суперпозиция колебаний различной частоты ротора генератора при нарушении установившегося режима работы энергосистемы (см. рис. 45). ,
, ,
,  – амплитуды колебаний с частотами
– амплитуды колебаний с частотами  и
и  для ротора первого генератора;
для ротора первого генератора; ,
,  – собственные частоты малых колебаний первого и второго генераторов (
– собственные частоты малых колебаний первого и второго генераторов (  и
и  );
); ,
,  – их декременты затухания.
– их декременты затухания.
 .
. ,
, ,
,
 .
.
 -го корня
-го корня  ,
, дает уравнение
дает уравнение .
. верно
верно ,
, – квадратная матрица,
– квадратная матрица,  – столбец, то
– столбец, то  .
.
 ,
, ,
, - единичная матрица
- единичная матрица ,
, .
. (апериодическое движение) или одним из пары комплексно сопряженных корней
(апериодическое движение) или одним из пары комплексно сопряженных корней  (колебательное движение с частотой
(колебательное движение с частотой  и декрементом затухания
и декрементом затухания  ).
). .
. , а в физическом смысле это амплитуда колебаний ротора данного генератора с указанной частотой
, а в физическом смысле это амплитуда колебаний ротора данного генератора с указанной частотой 

 , следовательно система данная будет линейно зависима. Для решения этой проблемы необходимо произвольно задать один из компонентов собственного вектора (например,
, следовательно система данная будет линейно зависима. Для решения этой проблемы необходимо произвольно задать один из компонентов собственного вектора (например,  ), исключив тем самым одно из уравнений и решив систему
), исключив тем самым одно из уравнений и решив систему  порядка с
порядка с  .
.
 ,
, ,
, матрицы состояния
матрицы состояния  .
.


 данная система приобретает вид
данная система приобретает вид ,
, .
.
 .
. .
. имеет место система также линейно зависимых уравнений
имеет место система также линейно зависимых уравнений
 .
. ) второй собственный вектор имеет вид
) второй собственный вектор имеет вид .
.
 .
. .
.
 ,
, , соответствующее данному собственному значению
, соответствующее данному собственному значению 
 .
. ;
; пар комплексно сопряженных собственных значений соответствующих
пар комплексно сопряженных собственных значений соответствующих 
 ,
, ;
; .
. – модуль собственного вектора,
– модуль собственного вектора, – фаза собственного вектора.
– фаза собственного вектора. , следовательно,мода системная. Если
, следовательно,мода системная. Если  для какого – либо i, то мода является локальной.
для какого – либо i, то мода является локальной.





 (частота), рад/с
(частота), рад/с





































 , является системной, поскольку для всех модулей компонент ее собственного вектора верно
, является системной, поскольку для всех модулей компонент ее собственного вектора верно  . По признакам фаз элементов собственного вектора она разбивается на две подсистемные моды (см. рис. 50)
. По признакам фаз элементов собственного вектора она разбивается на две подсистемные моды (см. рис. 50)
 , является локальной, поскольку два из шести компонент ее собственного вектора меньше десятой части максимального компонента, т.е. амплитуда колебаний роторов двух генераторов на данной частоте меньше десятой части амплитуды для второго генератора, для которого данная частота колебаний является собственной
, является локальной, поскольку два из шести компонент ее собственного вектора меньше десятой части максимального компонента, т.е. амплитуда колебаний роторов двух генераторов на данной частоте меньше десятой части амплитуды для второго генератора, для которого данная частота колебаний является собственной ,
, , также является локальной, поскольку
, также является локальной, поскольку .
. и неудовлетворительным при
и неудовлетворительным при  . Как видно из табл. 2 для первой моды демпфирование неудовлетворительно, а для остальных мод (для всех j принадлежащих диапазону 2…5)
. Как видно из табл. 2 для первой моды демпфирование неудовлетворительно, а для остальных мод (для всех j принадлежащих диапазону 2…5)  и демпфирование удовлетворительно.
и демпфирование удовлетворительно. .
.

 .
.
 ,
, .
. .
.



 ,
,

 .
.
 .
. ,
, ,
, ,
, ,
, .
. ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, .
.
 ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, .
. и собственные вектора
и собственные вектора  квадратной матрицы состояния
квадратной матрицы состояния  удовлетворяют уравнению
удовлетворяют уравнению
 соответствующего первому собственному значению матрицы
соответствующего первому собственному значению матрицы  ,
, .
. .
. ,
,
 (произведение строки и столбца дает число, что соответствует размерности собственного значения λ)
(произведение строки и столбца дает число, что соответствует размерности собственного значения λ)
 .
. ;
; ;
; .
. представляет собой произведение его начального приближения
представляет собой произведение его начального приближения  на матрицу
на матрицу  ,
, , диагональные элементы которой сдвинуты относительно
, диагональные элементы которой сдвинуты относительно  , т.е.
, т.е.
 – собственное значение матрицы
– собственное значение матрицы  ;
; ;
; ,
, – заданное число, характеризующее точность расчета;
– заданное число, характеризующее точность расчета; .
.
 со сдвигом диагональных элементов относительно
со сдвигом диагональных элементов относительно  .
.
 – собственное значение матрицы
– собственное значение матрицы 
 ,
, .
. ,
, .
.

 ,
, . Таким образом, в ходе первого итерационного цикла определяется первое собственное значение
. Таким образом, в ходе первого итерационного цикла определяется первое собственное значение  матрицы
матрицы 
 .
. ,
, ,
, ,
, .
.


 .
. ,
,
 .
. , что позволяет найти второе собственное значение матрицы
, что позволяет найти второе собственное значение матрицы