|
|
Устойчивость сжатых стержней, работающих в пределах упругостиРассмотрим условия равновесия шарика (рис. 1.18, а—в). Если шарику дать малое отклонение в горизонтальном направлений, то в первом случае он вернется в исходное положение (состояние устойчивое), во втором — не вернется (неустойчивое положение), а в третьем случае откатится в сторону и остановится (положение безразличного равновесия). Аналогичные явления наблюдаются и в упругих телах.
Рисунок 1.18
Пусть стержень нагружен продольной силой F (рис. 1.19). Приложим к стержню малую боковую силу DF и снимем ее. Как и в случаях с шариком (см. рис. 1.18), после снятия нагрузки стержень может: 1) вернуться в исходное положение; 2) не вернуться в исходное положение; 3) остаться искривленным, т. е. упругий стержень может иметь три состояния: устойчивое, неустойчивое и безразличное состояние равновесия. Эти три положения, однако, здесь существенно зависят от силы F и геометрических размеров стержня. Аналогичные явления наблюдаются и во многих тонкостенных упругих системах, оболочках, пластинах и др. При некотором значении силы F, называемом критическим F = Fкp, стержень не распрямится, а сохранит искривленное положение, т. е. безразличное состояние равновесия. При незначительном превышении критической силы стержень начнет сильно искривляться и разрушаться. Допускаемая величина продольной силы
где [n]у — запас устойчивости, который часто задается примерно равным запасу прочности по отношению к пределу текучести: [n]у ≈ [n]Т. (1.38) Критическое напряжение сжатого стержня σкр = Fкp/A может быть и меньше предела упругости, и больше. Впервые задача устойчивости сжатого стержня была решена Л. Эйлером в 1744 г. Он вывел формулу критической силы для длинных стержней, работающих в пределах упругости, из рассмотрения криволинейной формы равновесия стержня при постоянной нагрузке. Формула Эйлера имеет вид
где Е — модуль упругости материала Jmin — минимальный момент инерции сечения стержня; l — длина стержня; μ = 1/n — коэффициент приведения длины стержня, зависящий от числа полуволн n искривленного стержня, в свою очередь зависящих от вида закрепления стержня (рис. 1.20).
рис. 1.20
Вычислим по формуле Эйлера критические напряжения:
Принято обозначать Тогда формула (1.40) принимает вид
где Если обозначить λкр значение гибкости стержня, при котором критическое напряжение достигает предела упругости σкр =σп.у, то из (1.41) получим
Формула Эйлера применяется в пределах упругости материала стержня (0 < σкр < σп у), т. е. для гибкостей, больших критических (λ, > λкр).
Рекомендуемая литература ко II разделу Основная литература 1 Прикладная механика: Учебник для вузов / В.В. Джамай, Ю.Н. Дроздов, Е.А. Самойлов и др.; под ред. В.В. Джамая. - М.: Дрофа, 2004. - 414с. 2 Павлов, П.А. Сопротивление материалов / П.А. Павлов, Л.К. Паршин и др. Под ред. Б.Е. Мельникова – СПб.: Издательство «Лань», 2003. – 528 с. 3 621.38 Дополнительная литература 4 Ицкович, Г.М. Сопротивление материалов. / Г.М. Ицкович, - М.: Высш.шк. 1976.-439с.
Теория машин и механизмов
Теория механизмов и машин – наука об общих методах исследования свойств механизмов и машин и проектирования их схем. Машины и механизмы Машины и их классификация Машина – это устройство, выполняющее механическое движение для преобразования энергии, материалов или информации с целью замены или облегчения физического и умственного труда человека. По функциональному назначению машины делятся на классы: энергетические, технологические, транспортные, информационные. Энергетические машины подразделяют на машины-двигатели – предназначенные для преобразования энергии любого вида в механическую (двигатели внутреннего сгорания, электродвигатели) и машины-генераторы – для преобразования механической энергии в другой вид. Энергетические машины, предназначенные для преобразования механической энергии твёрдого тела в механическую энергию жидкости (или наоборот), называют гидравлическими машинами. К ним относятся гидротурбины, гидропередачи и нагнетатели: насосы, вентиляторы и компрессоры. Технологические машины предназначены для изменения размеров, формы, свойства или состояния предмета (металлообрабатывающие станки, прессы, машины пищевой, горной, текстильной, полиграфической, химической промышленности и др.). Транспортные машины, предназначенные для перемещения грузов: людей, изделий, подразделяют на транспортные средства (наземные, водные, воздушные, космические) и подъёмно-транспортирующие машины (подъемные краны, эскалаторы, транспортеры и т.п.) Информационные машины предназначены для получения и преобразования информации. Информационные машины выполняют контрольно-измерительные операции, функции регулирования и управления технологическими процессами. Машинный агрегат (рисунок 1.1) – сочетание машины-двигателя (М), передаточных механизмов и исполнительного органа. Для согласования работы двигателя и исполнительного органа имеется система управления. Широкими стрелками показано направление передачи механической энергии, а тонкими – управляющие воздействия.
Рисунок 1.1 – Принципиальная схема машинного агрегата
Если из машинного агрегата исключить исполнительный механизм, останется привод – устройство для приведения в действие машины или механизма (рисунок 1.2).
Строение механизмов
В структурном отношении машина представляет собой единый комплекс механизмов. Механизмы могут иметь и самостоятельное значение как, например, ручные грузоподъёмные механизмы: блоки, тали, домкраты. Механизм – система тел, предназначенных для преобразования независимого движения одного или нескольких тел в требуемое движение остальных тел.
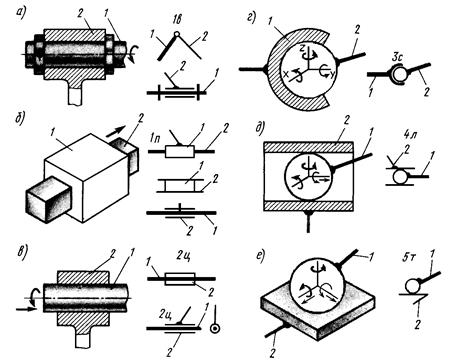
Твердые тела, из которых образуется механизм, называют звеньями. Звено – либо одна деталь, либо совокупность нескольких деталей, соединенных в одну кинематически неизменяемую систему. Неподвижное звено механизма для краткости называют стойкой; понятие неподвижности стойки для механизмов транспортных машин, в частности летательных аппаратов, – условное, поскольку в этом случае сама стойка движется. Кинематической парой (сокращенно – парой) называют подвижное соединение двух соприкасающихся звеньев (рисунок 1.3). Совокупность поверхностей, линий и точек звена, входящих в соприкосновение (контакт) с другим звеном пары, называют элементом пары. Для того чтобы элементы пары находились в постоянном соприкосновении, пара должна быть замкнута геометрическим (за счет конструктивной формы звеньев) или силовым (силой тяжести, пружиной, силой давления жидкости или газа и т. п.) способом.
Рисунок 1.3 – Схемы кинематических пар: а) – вращательная, одноподвижная, низшая, замкнутая геометрически; б) – поступательная, одноподвижная, низшая, замкнутая геометрически; в) – цилиндрическая, двухподвижная, низшая, замкнутая геометрически, допускает независимые вращательное и поступательное движения; г) – сферическая, трёхподвижная, допускает три независимых относительных вращения звеньев вокруг осей x, y, z, низшая, с геометрическим замыканием; д) – четырёхподвижная с линейным контактом (высшая) с геометрическим замыканием; е) – пятиподвижная с точечным контактом (высшая) пара, требующая силового замыкания
Кинематические пары во многом определяют работоспособность и надежность машины, поскольку через них передаются усилия от одного звена к другому; в кинематических парах, вследствие относительного движения, возникает трение, элементы пары находятся в напряженном состоянии и в процессе изнашивания. Систему звеньев, образующих между собой кинематические пары, называют кинематической цепью. Различают замкнутые и незамкнутые кинематические цепи. В замкнутой цепи каждое звено входит не менее чем в две кинематические пары, в незамкнутой цепи есть звенья, входящие только в одну кинематическую пару. Применяя термин «кинематическая цепь», можно дать следующее определение механизма: механизм — кинематическая цепь, в которой при одном неподвижном звене (стойке) и заданном движении одного или нескольких звеньев (ведущих) все остальные звенья (ведомые) совершают однозначно определённые движения. Различают входные и выходные звенья механизма. Выходным называют звено, совершающее движение, для которого предназначен механизм. Входным называют звено, которому сообщается движение, преобразуемое механизмом в требуемое движение выходного звена. |
|
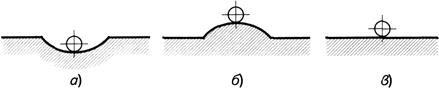
 Рисунок 1.19
Рисунок 1.19 , (1.37)
, (1.37) , (1.39)
, (1.39)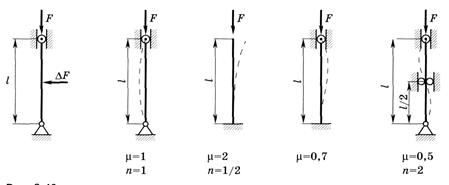
 . (1.40)
. (1.40) , где imin — радиус инерции сечения.
, где imin — радиус инерции сечения. , (1.41)
, (1.41) - гибкость стержня.
- гибкость стержня. . (1.42)
. (1.42)