|
|
Алгоритмы построения выпуклых оболочекЛабораторная работа № 1 Цель работы: научиться строить выпуклые оболочки Задачи:. реализовать алгоритмы построения выпуклой оболочки: при пошаговом вводе точек, методом "заворачивания подарка", методом Грэхема Алгоритмы построения выпуклых оболочек 1. Ввод оболочки. Ввод оболочки представляет собой специальный подход к поиску выпуклой оболочки для конечного набора точек S путем последовательного ввода по одной точке и поддержание выпуклой оболочки для всех точек, введенных до этого момента. Такую оболочку будем называть текущей оболочкой. Вначале текущая оболочка состоит из одной точки, принадлежащей S. По завершении ввода всех точек текущая оболочка становится эквивалентной выпуклой оболочке CH(S) и задача оказывается решенной. При вводе каждой новой точки s в текущую оболочку могут возникнуть две ситуации. В первом случае точка s может принадлежать текущей оболочке (находиться на ее границе или внутри) и тогда текущую оболочку изменять не требуется. Во втором случае точка s лежит вне текущей оболочки и ее требуется модифицировать, как показано, например, на рис. 5.6. Через точку s могут
Рис. 5.6. Включение точки s в текущую оболочку. быть проведены две вспомогательные прямые линии, каждая из которых образует касательную к текущей оболочке. (Линия является касательной к выпуклому полигону P, если она проходит через вершину Р и внутренняя область полигона Р полностью лежит по одну сторону от этой прямой линии). Левая (правая) касательная Две вершины l и r, через которые проходят касательные, делят границу текущей оболочки на две цепочки вершин: ближняя цепочка, которая расположена ближе к точке s, и дальняя цепочка, которая находится дальше от точки s. (Ближняя цепочка расположена с той же стороны от отрезка прямой Следующая программа insertionHull возвращает текущую оболочку для массива s из n точек: Point somePoint; // global На шаге i точка s[i] вносится в текущую оболочку р. Обращение к функции leastVertexперемещает окно полигона p на вершину, которая расположена ближе всего к точке s[i]. При этом осуществляется подготовка к последующему обращению supportingLine(s[i], р, LEFT), переносящему окно на вершину l через которую проходит левая касательная. При втором обращении к функции supportingLine окно перемещается на вершину r. Операция расщепления split применяется для удаления полигона p по его диагонали Рассмотрим функцию supportingLine более детально. Для определения вершины l, через которую проходит левая касательная, начнем с некоторой вершины в ближней цепочке и затем будем совершать обход по часовой стрелке вдоль текущей оболочки до тех пор, пока не дойдем до первой вершины v, последователь которой не лежит ни слева, ни после направленного отрезка прямой линии При обращении к функции supportingLine в качестве аргументов задается полигон p, точка sвне полигона p и один из параметров типа перечисления LEFT или RIGHT (слева или справа), показывающий, какая из вершин (l или r) имеется в виду. Предполагается, что вершина, находящаяся в окне для полигона p, принадлежит ближней цепочке, что обеспечивается предварительным обращением к функции leastVertex. Функция перемещает окно полигона p на вершину, которую она находит (l или r): void supportingLine(Point &s, Polygon *p, int side} Функция leastVertex, описанная в подразделе 4.3.6, используется программой insertionHullдля нахождения в полигоне p вершины, расположенной ближе всего к точке, хранящейся в глобальной переменной somePoint. Функция сравнения closestToPolygonCmp, вместе с которой вызывается функция leastVertex, сравнивает две точки и выбирает, какая из них находится ближе к точке somePoint: int closestToPolygonCnp(Point *a, Point *b) 2. Построение выпуклой оболочки: метод обхода Грэхема. В этом разделе мы раскроем сущность способа построения выпуклой оболочки по методу обхода Грэхема, названному так по имени его создателя. В методе обхода Грэхема выпуклая оболочка конечного набора точек S находится в два этапа. На первом этапе предварительной сортировки алгоритм выбирает экстремальную точку
Рис. 6.2. Обозначение точек на основе их полярной координаты относительно точки удалить из текущей оболочки. Это даст положительный результат по сравнению со способом ввода оболочки, описанным в предыдущей главе, при котором обрабатываются все точки и каждый раз принимается решение о включении точки в текущую оболочку и, если она включается, то просматривается вся граница текущей оболочки для определения вершин, подлежащих удалению. Для заданного набора точек S при методе обхода Грэхема сначала находится некоторая экстремальная точка На этапе построения выпуклой оболочки при методе Грэхема текущая выпуклая оболочка строится на основе уже обработанных точек. На рис. 6.3 показан процесс работы алгоритма. Рассмотрим обработку точки В программу grahamScan передается массив pts из n точек и возвращается полигон, представляющий собой выпуклую оболочку для точек pts. Программа выполняется за пять шагов: первые два образуют этап предварительной сортировки, а в течение оставшихся трех находится выпуклая оболочка:
Рис. 6.3. Работа по методу обхода Грэхема. 1. Поиск экстремальной точки Программа выглядит следующим образом: Point originPt; Первый шаг ясен. На шаге 2 создается массив p и его элементы инициализируются равными точкам Point в массиве pts. Нам требуется массив указателей, чтобы можно было использовать одну из обобщенных подпрограмм сортировки. Затем массив p сортируется с помощью функции сравнения polarCmp, которая определена в разделе 5.2 в контексте построения звездчатого полигона по заданному набору точек. Напомним, что глобальная iпеременная originPt используется для того, чтобы передать в функцию polarCmp начальную точку - в данном случае точку На 3 и 4 шагах в стеке s создается текущая оболочка. Пусть имеем набор 1. Точки 2. Ребро На шаге 3 эти условия определяются предварительно. В цикле for осуществляется пошаговое продвижение по лучу На шаге 4, проиллюстрированном на рис. 6.4, обрабатывается точка Назначение условия 2 заключается в гарантии существования точки На шаге 5 программа grahamScan формирует объект q типа Polygon путем итеративного вызова точки из стека и записи ее в q. Согласно условию 1 точки вызываются из стека в порядке обхода по часовой стрелке.
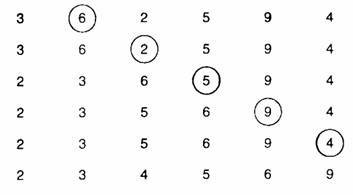
Рис. 6.4. Включение точки Что касается времени работы, то легко видеть, что каждый из шагов 1, 3 и 5 выполняется за время 3. Сортировка при вводе. Сортировка при вводе работает так же, как игрок в карты держит в руках карты. Вначале колода карт лежит на столе, лицом вниз. По мере взятия карт из колоды игрок располагает их в руке, помещая в определенном порядке. Перед взятием очередной карты все уже взятые карты отсортированы по порядку. Рассмотрим, как использовать сортировку при вводе для упорядочения элементов массиваа[0], . . ., а[n-1] в порядке увеличения. (Для краткости этот набор элементов будем обозначать как a[0 . . . n-1]). Для каждого i от 1 до n - 1 в начале итерации i подмассив a[0...i-l] считается отсортированным. Наша задача на шаге итерации i заключается в сортировке массива a[0...i]путем занесения элемента a[i] в его соответствующую позицию. Чтобы выполнить это, мы запишем элемент a[i] в некоторой переменной v и затем по очереди будем перемещать элементы a[i-1], a[i-2], ... на один элемент вправо до тех пор, пока не найдем первый элементa[j-l], не больший, чем v. Наконец скопируем значение v в "дырку", которая образовалась в позиции j. На рис. 5.1 показано, как этот алгоритм сортирует короткий массив целый чисел.
Рис. 5.1. Сортировка при вводе массива из шести целых чисел. Кружком отмечены очередные числа, подлежащие вводу. Алгоритм реализован шаблоном функции insertionSort, которая сортирует массив a[0...n-1]. Аргумент cmp устанавливает функцию сравнения, которая возвращает значения -1, 0 или 1, если ее первый аргумент меньше, равен или больше второго аргумента соответственно: template< class T > На каждой итерации i от 1 до n - 1 цикл while вводит элемент a[i] в сортируемый подмассивa[0. . .1-1]. Проверка j > 0 в цикле while гарантирует, что работа программы не нарушится при достижении начального элемента массива a в процессе ввода. В представленной здесь программе сортировки предполагается, что параметр типа T в шаблоне является типом указателя. Тем не менее шаблон функции insertionSort, может быть использован для сортировки объектов любого типа, для которых существует оператор присвоения = и копирующий конструктор. Например, следующий фрагмент программы считывает 100 строк в массив s и затем сортирует их с помощью стандартной библиотечной программы strcpy языка C++, которая сравнивает строки символов в словарном порядке. char buffer[80]; Заметим, что в этом фрагменте программы сортируется скорее массив указателей на строки (массив s), чем сами строки. Очень часто оказывается, что гораздо эффективнее сортировать указатели вместо самих объектов, на которые они указывают. Если объекты не очень малы (четыре байта или меньше), то сортирующая программа может перемещать указатели быстрее, чем сами объекты. 4. Построение выпуклой оболочки способом "заворачивание подарка". Один из способов формирования выпуклой оболочки конечного набора точек S на плоскости напоминает действия по вычерчиванию выпуклой оболочки с помощью линейки и карандаша. Вначале выбирается некоторая точка Процесс поворота луча вокруг каждой точки является "выбирающей" частью алгоритма. При выборе точки, следующей за точкой a на границе выпуклой оболочки, ищем такую точку b, для которой нет ни одной точки, лежащей слева от луча Polygon *giftwrapHull(Point s[], int n) Вращение луча вокруг некоторой точки s[m] моделируется внутренним циклом for. Точкаs[a] должна быть самой левой, которая встречается на пути луча. Если новая точка s[i] лежит слева от луча, начинающегося в точке s[m] и проходящего через точку s[a], тогда вращаемый луч должен поместить точку s[i] перед точкой s[a], так что точка a будет изменена.
Рис 6.1. Заворачивание подарка для набора точек на плоскости. Переменная a также изменяется, если точка s[i] лежит позади s[a] - точка s[a] не может быть вершиной выпуклой оболочки, если она лежит между точками s[m] и s[i]. Заметим, что функция giftwrapHull реорганизует точки в массиве s. В конце шага mподмассив s[0..m] содержит известные вершины выпуклой оболочки, упорядоченные в направлении по движению часовой стрелки, а подмассив s[m+l..n-l] содержит остальные точки, которые принадлежат или нет вершинам выпуклой оболочки. Именно эти последние точки и должны проверяться на последующих шагах.
|
|

 проходит через некоторую вершину l(r) текущей оболочки и лежит слева (справа) от текущей оболочки. Если наблюдатель находится в точке s и смотрит на выпуклую оболочку, то левая касательная будет видна слева, а правая касательная - справа.
проходит через некоторую вершину l(r) текущей оболочки и лежит слева (справа) от текущей оболочки. Если наблюдатель находится в точке s и смотрит на выпуклую оболочку, то левая касательная будет видна слева, а правая касательная - справа.


 такая, что она явно должна принадлежать границе выпуклой оболочки - для этого годится самая левая точка. Затем вертикальный луч поворачивается по направлению движения часовой стрелки вокруг этой точки до тех пор, пока он не наткнется на некоторую другую точку b в наборе S; отрезок
такая, что она явно должна принадлежать границе выпуклой оболочки - для этого годится самая левая точка. Затем вертикальный луч поворачивается по направлению движения часовой стрелки вокруг этой точки до тех пор, пока он не наткнется на некоторую другую точку b в наборе S; отрезок  будет ребром выпуклой оболочки. Для поиска следующего ребра будем продолжать вращение луча по часовой стрелке, на этот раз вокруг точки b до встречи со следующей точкой c из набора S, отрезок
будет ребром выпуклой оболочки. Для поиска следующего ребра будем продолжать вращение луча по часовой стрелке, на этот раз вокруг точки b до встречи со следующей точкой c из набора S, отрезок  будет следующим ребром выпуклой оболочки. Этот процесс продолжается до тех пор, пока не будет достигнута точка a. Процесс изображен на рис. 6.1, он получил название способ "заворачивание подарка".
будет следующим ребром выпуклой оболочки. Этот процесс продолжается до тех пор, пока не будет достигнута точка a. Процесс изображен на рис. 6.1, он получил название способ "заворачивание подарка". . Все точки анализируются по очереди, пока алгоритм не проследит весь путь, вплоть до самой левой точки, обнаруженной к этому моменту. При этом проверке подвергаются только те еще не известные точки, которые должны принадлежать границе выпуклой оболочки. Следующая программаgiftwrapHull возвращает полигон, представляющий выпуклую оболочку n точек в массиве s. Массив s должен иметь длину n+1, поскольку в элементе s[n] программа хранит ограничивающий элемент ("страж"):
. Все точки анализируются по очереди, пока алгоритм не проследит весь путь, вплоть до самой левой точки, обнаруженной к этому моменту. При этом проверке подвергаются только те еще не известные точки, которые должны принадлежать границе выпуклой оболочки. Следующая программаgiftwrapHull возвращает полигон, представляющий выпуклую оболочку n точек в массиве s. Массив s должен иметь длину n+1, поскольку в элементе s[n] программа хранит ограничивающий элемент ("страж"):