|
|
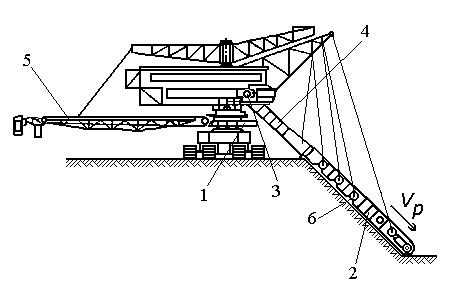
Цепные многоковшовые экскаваторы.Цепной экскаватор – самоходная выемочно-погрузочная машина непрерывного действия на рельсовом или гусеничном ходу, с поворотной платформой. Цепные экскаваторы используются в основном для нижнего черпания, но могут применяться и для верхнего черпания.
Рис. 7.1. Схема многоковшового цепного экскаватора 1 – поворотная платформа; 2 – ковшовая рама; 3 – приводная звездочка; 4 – приемный желоб; 5 – отвальная консоль; 6 – шарнир;
Цепной экскаватор зачерпывает горную массу ковшами, укрепленными на бесконечной цепи, движущейся по ковшовой раме 2 и приводимой в движение приводной звездочкой 3. Двигаясь по забою снизу вверх (на рис.7.1. Vр – направление движения ковшовой цепи), ковши заполняются горной породой и транспортируют ее по приемному желобу 4 к приводной звездочке 3. Там ковши опрокидываются, и порода высыпается в бункер или на приемный промежуточный конвейер, с которого она поступает на конвейер отвальной консоли 5. Верхняя часть ковшовой рамы размещается в приемном желобе 4, который опускается до бровки забоя и служит для подъема груженых ковшей к месту разгрузки. Рабочее оборудование цепного экскаватора состоит из ковшовой рамы с подвеской и цепью, имеющей от 20 до 60 ковшей. Ковшовая цепь движется в направляющих по роликам (см. рис. 7.2.).
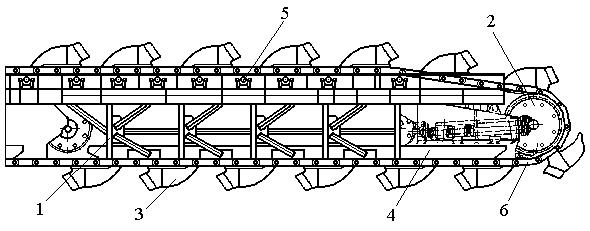
Рис.7.2. Ковшовая рама 1 – ферма; 2 – направляющее колесо; 3 – ковш; 4 – направляющая ковшовой цепи; 5 – поддерживающий ролик; 6 – ковшовая цепь.
Ковшовые рамы выполняются в виде решетчатой фермы прямоугольного поперечного сечения. Подвеска рамы состоит из системы полиспастов, удерживающих раму в нужном положении. Шарнирная рама подвешивается за каждый шарнир. Изменяя длину отдельных подвесок, можно придать раме желаемый изгиб. Ковшовая цепь состоит из звеньев, соединенных между собой шарнирами. Ковши крепятся к звеньям цепи, называемым рабочими. Между рабочими звеньями находится от четырех до восьми холостых звеньев. Шагом цепи (длиной звена) и числом холостых звеньев определяется расстояние между ковшами. Чем плотнее порода, разрабатываемая экскаватором и чем больше емкость ковша, тем большими должны быть шаг цепи и число холостых звеньев. Многоковшовые цепные экскаваторы производятся в Чехии и ФРГ с теоретической производительностью 300 – 14500 м3/ч на гусеничном (Ers) или (Es) рельсовом ходу. Маркировка экскаватора, например Es-4500.27/28.14500, расшифровывается следующим образом: цепной полноповоротный экскаватор на рельсовом ходу с ковшами вместимостью 4500 литров, высотой 27 м и глубиной копания 28 м, теоретической производительностью 14500 м3/ч по рыхлой массе.
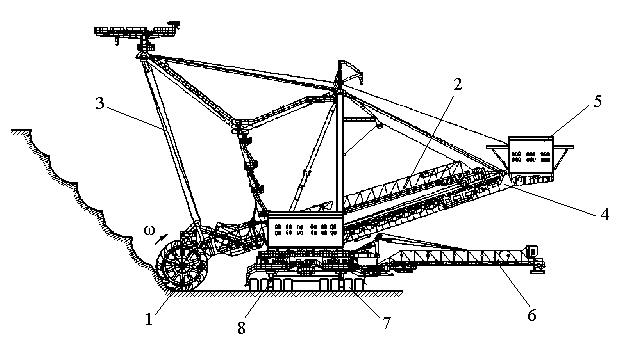
Роторные экскаваторы. Карьерные роторные экскаваторы широко применяются в горнодобывающей промышленности на вскрышных и добычных работах. В настоящее время их успешно используют как для экскавации мягких, так и крепких горных пород. К основным преимуществам роторных экскаваторов относятся: - приспособленность к селективной выемке; - непрерывность рабочего процесса; - более высокие, чем у одноковшовых и цепных экскаваторов, значения коэффициента полезного действия и скорости процесса экскавации. Роторный экскаватор представляет собой самоходную машину непрерывного действия, экскавирующую горную породу ковшами, укрепленными на роторном колесе, и предназначенную для одновременной выемки и транспортирования вскрышных пород или полезного ископаемого. Транспортирование породы после разгрузки ее из ковшей ротора осуществляется конвейером, расположенным на стреле. Роторный экскаватор состоит из рабочего, транспортирующего, ходового, силового и управляющего оборудования, поворотной платформы с верхним строением и уравновешивающими консолями (см. рис.8.1.).
Рис.8.1. Схема роторного экскаватора 1 – роторное колесо; 2 – роторная стрела; 3 – подвеска стрелы; 4 – стрела противовеса; 5 – машинный зал; 6 – отвальная консоль; 7 – гусеничная тележка; 8 – поворотная платформа.
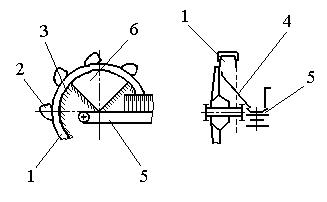
Рабочее оборудование включает ротор с ковшами, приемно-питающее устройство, стрелу ротора и приводные механизмы, осуществляющие рабочие движения ротора, т.е. вращение и подачу. Ротор совершает движение в горизонтальной и вертикальной плоскостях. Основными рабочими движениями являются вращение ротора в вертикальной плоскости и поворот стрелы с ротором на поворотной платформе в горизонтальной плоскости. Гравитационная разгрузка ковшей ротора, получившая наибольшее распространение, осуществляется следующим образом (см. рис.8.2.).
Рис.8.2. Схема роторного колеса 1 – роторное колесо; 2 – ковш; 3 – обечайка; 4 – лоток; 5 – конвейер; 6 – разгрузочный сектор.
Порода в ковшах 2 перемещается по неподвижной обечайке 3, прикрепленной к стреле и закрывающей подковшовое пространство с внутренней стороны. Порода, при выходе ковша за пределы обечайки в районе разгрузочного сектора 6, падает вниз и передается по наклонному лотку 4 на конвейер роторной стрелы. Конструкция ковшей роторного колеса должна обеспечивать осуществление процессов резания и заполнения ковша с возможно меньшими энергозатратами и исключение залипания его режущего периметра и внутренней полости. Корпус ковша может быть со сплошным днищем для экскавации пород, не восстанавливающих свою связность после экскавации (песчаные и супесчаные породы, скальные прослойки с малой влажностью), или с цепным днищем для экскавации тяжелых и липких пород (см. рис.8.3.). В верхнем положении ковша на роторе цепи провисают внутрь, стряхивая с себя налипшую породу.
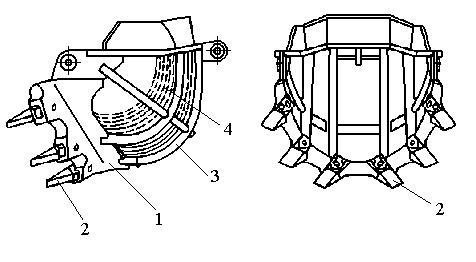
Рис.8.3. Ковш роторного колеса 1 – арочный козырек; 2 – зуб; 3 – каркасный корпус; 4 – цепное днище.
Производство карьерных роторных экскаваторов осуществляется в Росси на ГП «Крастяжмаш», на Украине Донецким (ДМЗ), Ново-Краматорским (НКМЗ) и Азовским (Азовмаш) машиностроительными заводами. За рубежом наиболее крупными производителями роторных экскаваторов являются фирмы ФРГ и Чехии.
Литература
1. Добронравов С.С., Дронов В.Г. Строительные машины и основы автоматизации. - М.: Высшая школа, 2001. 2. Ефимов В.Н., Цветков В.Н., Садовников Е.М. Карьерные экскаваторы. М.: Недра, 1994. 3. Лимитовский А.М. Электропривод и электроснабжение горных предприятий. - М.: МГРИ, 1991. 4. Одноковшовые экскаваторы НКМЗ /Ю.Я.Вуль, Ю.Т.Калашников и др. М.: Недра, 1978. 5. Подэрни Р.Ю. Горные машины и комплексы для открытых горных работ. - М.: МГГУ, 2001. 6. Справочник механика открытых работ /под ред. Щадова М.И., Подэрни Р.Ю.- М.: Недра, 1989. 7. Шестопалов К.К. Подъемно-транспортные, строительные и дорожные машины и оборудование. - М.: Мастерство, 2002.
|
|