|
|
Общие компетенции (теоретические сведения).Инструкция и методические указания для выполнения Лабораторно-практического занятия. Для студентов заочного обучения специальности 13.02.10. «Электрические машины и аппараты». Киров, 2015.
Печатается по решению Методического совета ГОУ СПО «Кировский авиационный техникум» (протокол № от 2015 г.) Методические указания по лабораторно-практическим занятиям по дисциплине «Электрооборудование станков машиностроительного производства» для студентов 5 курса заочной формы обучения составлены в соответствии с рабочей программой дисциплины, одобренной цикловой комиссией электротехнических специальностей Протокол №___ от «____»_________2015г.
Председатель цикловой комиссии «электрические машины и аппараты» _______________ Любчак Т.Н.
Составитель:В.А. Садовников– преподаватель Кировского авиационного техникума Дисциплина «Электрооборудование станков машиностроительного производства» и методические указания лабораторно-практическим занятиям для студентов 5 курса заочной формы обучения по специальности 13.02.10.- «Электрические машины и аппараты». В.А. Садовников ; Методические указания к лабораторно-практическим работам по дисциплине «Электрооборудование станков машиностроительного производства» предназначены для работы студентов 5 курса заочной формы обучения на занятии как самостоятельно, так и под руководством преподавателя. Содержат описание практических, лабораторных занятий, охватывающих цикл теоретических занятий дисциплины, нацелены на формирование необходимых общеучебных и предметных умений и навыков. Могут быть полезны студентам электротехнических специальностей дневного обучения.
© В.А.Садовников, преподаватель Кировского авиационного техникума, Заслуженный учитель Российской Федерации..
Рецензент: В.К. Дегтярев, механик Кировского авиационного техникума, Почетный работник СПО.
Содержание
1.Пояснительная записка. 1.Овладение теоретическими знаниями и практическими навыками для практической деятельности по эксплуатации электрооборудования машиностроительного производства формируются как на теоретических занятиях, так и при выполнении лабораторно-практических работ. 2.Лабораторно-практическая работа - это такой метод обучения, при котором студенты под руководством преподавателя и в соответствии с порядком проведения работы не только выполняют требования методических указаний и заданий преподавателя, но и осмысливают и воспринимают новый материал как один из этапов подготовки к индивидуальной профессиональной деятельности в производственных условиях. 3.Определяющим фактором овладения техническими знаниями и первоначальными навыками эксплуатации электрического оборудования в машиностроительном производстве является мотивирование студентов заочного обучения для самостоятельной оценки овладения общими и профессиональными компетенциями в процессе производственной деятельности в соответствии с индивидуальными заданиями каждому студенту. Этой целее служат электронные варианты как теоретического материала, так и лабораторно-практической части подготовки. Специалиста. 4.Одним из условий успешной деятельности в будущем является овладение общими и профессиональными компетенциями. Частично этой цели служит необходимость подготовки терминологического словаря, как составной части подготовки и защиты отчета по выполненной лабораторно-практической работе. Цель занятия. 2.1.Ознакомиться с конструктивными особенностями приводов главных и вспомогательных механизмов металлорежущих станков и гибких производственных модулей. 2.2.Ознакомиться с конструктивными особенностями силовых блоков систем электроприводов рабочего оборудования металлорежущих станков. 2.3 Изучить назначение, устройство и принцип работы тиристорного 2.3.1Однофазных нереверсивных и реверсивных ( на примере МРС ТПК 125 ТВ) 2.3.2..Трехфазных нереверсивных и реверсивных (на примере МРС 16Б16, 16К20 Т1). 2.3.4. Ознакомиться и изучить блок-схему и функциональную схему типового тиристорного преобразователя на примере приводов станков в лаборатории. 2.4.Изучить расчетные и электромеханические характеристики и работу приводов механизмов МРС в двигательном и тормозных режимах. 2.5. Освоить элементарные приёмы ручного управления и наладки приводами рабочих механизмов металлорежущих станков. 2.6. Закрепить теоретический материал по основным понятиям об электрооборудовании и электроприводах станков, как составной части механических участков машиностроительного производства. 2.7. Овладеть общими и профессиональными компетенциями в соответствии с проведенным занятием.
Основные элементы электрооборудования, применяемого в системах управления оборудованием, используемого при выполнении лабораторно- практической работы. 3.1. Электрические двигатели постоянного тока со встроенным тахогенератором и асинхронные электродвигатели приводов рабочих механизмов.. 3.2. Силовой тиристорный блок. 3.3.Релейно - контакторный коммутатор изменения направления вращения 3.4.Блок питания. 3.5.Шкафы электроавтоматики МРС модели 16Б16П. ТПК 125 ТВ, 16К20 Т1.
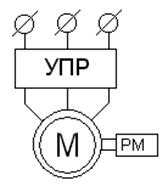
Общие компетенции (теоретические сведения). Электрическое оборудование металлорежущих станков и промышленных роботов, как составная часть гибких производственных модулей, включает в себя большое количество наименования электрического оборудования, объединённых общим понятием - электрический привод. Электрический привод— это сложная электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройства. Привод предназначен для приведения в движение исполнительных органов рабочей машины и управления этими движениями. Механизмы главного движения, подачи и вспомогательных перемещений станков имеют разные схемы приводов, изображённых на рис.1. (см.Приложение) Выбор схем приводов, системы электропривода определяется требованиями конкретного механизма и станком в целом. В универсальных станках, в станках с ЧПУ и промышленных роботах применяются более сложные системы автоматического регулирования и управления, что определено высокими требованиями рабочих механизмов к электрическим приводам. Это, в свою очередь, определило широкую номенклатуру типовых комплектных электроприводов для универсального оборудования и станков с ЧПУ и промышленных роботов. Тиристорный электропривод -силовая основа современныхрегулируемых электроприводов станков и промышленных роботов. В настоящее время применяются однофазные и трёхфазные комплектные тиристорные преобразователи для электропривода. Тиристорный преобразователь, работающий на нагрузку в виде двигателя постоянного тока состоит из основных частей (рис.3.) : • системы импульсно — фазового управления СИФУ; • силовой части преобразователя (силового блока). Силовой блок в зависимости от типа привода (рис.2.) состоит из тиристоров или диод - тиристоров (тиристорных или диод - тиристорных блоков). Тиристорный элетропривод главного движения, например, МРС ТПК 125 ТВ и привода подачи МРС 16Б16П представляет собой одноконтурную систему управления скоростью электродвигателя постоянного тока (рис.4.). Скорость двигателя определяется:
Udo ~ среднее значение выпрямленного напряжения при холостом ходе выпрямителя и полностью открытых тиристорах, m — число фаз выпрямителя, а - угол открывания тиристоров, Rяц - сопротивление якорной цепи, Се,См - конструктивные коэффициенты электрических машин, Ф - магнитный поток электрического двигателя, Iя, М - ток якоря и момент электрического двигателя. Порядок выполнение работы. 5.1. Внимательно ознакомиться с содержанием методических указаний. Обратить особое внимание на пункт 4.Общие компетенции (теоретические сведения). 5.2. Ознакомиться с элементами электрического оборудования металлорежущих станков, используемого при выполнении лабораторно-практической работы. 5.3.Повторить пройденный на теоретических занятиях материал по основам 5.4. Включить тиристорный преобразователь в работу и выполнить задание преподавателя.
ВНИМАНИЕ! ВЫПОЛНЯТЬ ТОЛЬКО ЗАДАНИЕ ПРЕПОДАВАТЕЛЯ! 5.5. Ознакомиться с работой электроприводов в двигательном и тормозном 5.6. Изучить принцип работы силовых блоков систем приводов по заданию преподавателя из числа схем, приведенных в инструкции. Подготовка отчёта. Отчёт выполняется по форме, принятой в техникуме. Отчёт должен содержать выполненные на листе формата А4 типовые схемы приводов МРС, блок - схему, функциональную схему, принципиальную схему тиристорного преобразователя, таблицу компонентов электропривода, а также технические данные элементов электрооборудования (по заданию преподавателя). Вопросы для подготовки к зачёту по выполненному занятию.. 7.1. Основные понятия и определения электрического привода. Классификация электроприводов. 7.2 .Типовые схемы приводов рабочих механизмов станков. 7.3. Обобщённая схема электропривода. Назначение и реализация компонентов согласно обобщённой схеме. 7.4. Принцип работы тиристорных преобразователей. 7.5. Электромеханические свойства двигателей постоянного тока. 7.6 .Понятие о регулировании координат.
Приложение 1. Рис.1.Обобщенные типовые схемы приводов рабочих механизмов металлорежущих станков.
1. 2. 3.
Бесконтактный управляемый Разомкнутый эл. привод Эл. привод постоянного переключатель цепей обмоток постоянного тока с ручным с обратной по
7. Эл. привод постоянного тока 8. Обобщенная схема электропривода с обратной связью по скорости и и положению рабочего органа
ВНИМАНИЕ Ознакомившись с вариантами выполнения приводов рабочих механизмов металлорежущих станков указанных в инструкции, опишите в отчете конструктивные особенности приводов согласно типовым схемам приводов рабочих механизмов станков Приложение 1, рис.1 и задания преподавателя.

А
Рис.3. Блок -схема тиристорного преобразователя
Рис.4. Принципиальная схема тиристорного преобразователя привода главного движения станка ТПК-125 ТВ.
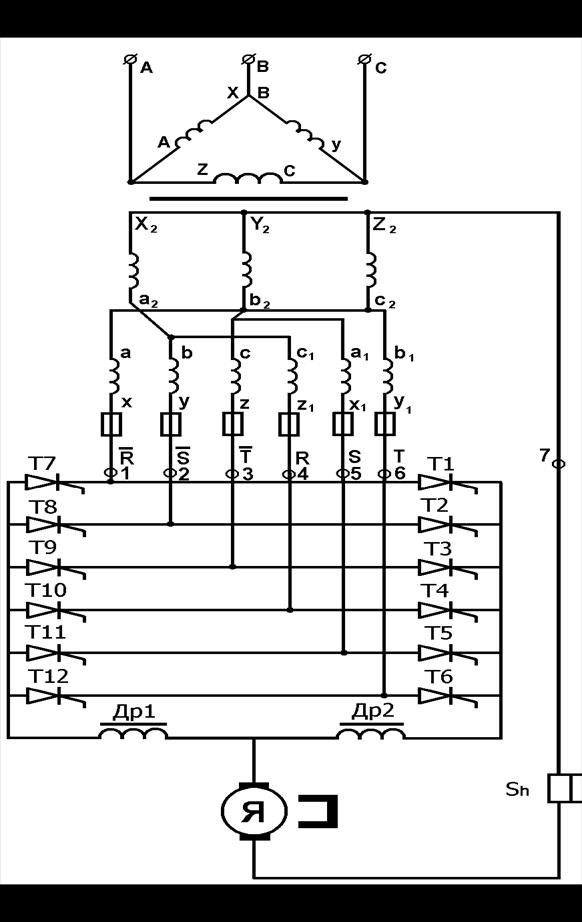
Рис.5. Принципиальная схема силового блока тиристорного преобразователя «Кемтор». Приложение 2. Минимальный перечень общих компетенций ( терминов, основных понятий, ключевых слов и словосочетаний), определения которых студент должен знать.
1. Электрический привод. 2. Асинхронный двигатель 3. Одиночный электропривод (индивидуальный) 4. Группой электропривод 5. Многодвигательный электропривод. 6. Якорь двигателя постоянного тока 7. Холостой ход (х.х.) 8. Идеальный холостой ход. 9.Номинальный ток электродвигателя. 10. Пусковой момент 11.Режим противовключения 12.Естественная механическая характеристика электродвигателя. 13.Искусственные механические характеристики электродвигателей. 14.Скольжение. 15.Ступень механического регулирования 16.Ступень электрического регулирования 17.Пределы регулирования 18.Диапазон регулирования скорости рабочего механизма станка
Приложение 3. |
|






 статора ас. кз. двигателя. управлением. скорости.
статора ас. кз. двигателя. управлением. скорости.

 Рис 2. Приципиальные схемы силовых блоков тиристорных преобразователей.
Рис 2. Приципиальные схемы силовых блоков тиристорных преобразователей.