|
|
Электронный магнитный компасВИДЫ КОМПАСОВ И ИХ АНАЛИЗ Принцип действия судовых магнитных компасов Рассмотрим прямолинейный схематический магнит длиной 21, который укреплен так, что он может свободно вращаться в горизонтальной плоскости вокруг вертикальной оси, проходящей через точку О (рисунок 1.1). В однородном магнитном поле Земли на стрелку действует горизонтальная составляющая Н напряженности поля, направленная по магнитному меридиану, т. е. к полюсам магнита приложена пара сил
Где:
Н - горизонтальная составляющая напряженности; М - магнитный момент. Под действием вращающего момента L магнит устанавливается в магнитном меридиане. На этом принципе и основано действие магнитного компаса. По мере увеличения магнитной широты горизонтальная составляющая Hуменьшается и, следовательно, вращающий момент компасной стрелки будет также уменьшаться. Поэтому в районах, прилегающих к магнитным полюсам, магнитный компас не работает. Определим величину L в средних магнитных широтах (в районах, где Н= 12 А-м- 1 ) для a = 10 при М = 1,5 А* м2. Напомним что
Тогда:
Столь малое значение направляющего момента ставит задачу сведения до минимума трения в подвеске компасной стрелки. При наличии трения компасная стрелка установится к меридиану под некоторым углом, называемым углом застоя. При расчетах угол застоя атр (°) определяют по формуле:
где Q- момент трения в точке подвеса стрелки, Н*м. В целях уменьшения угла застоя в судовых компасах принимают следующие меры: увеличивают магнитный момент стрелки М посредством использования магнитных сплавов, обладающих большой намагниченностью J и большой коэрцитивной силой Hс; уменьшают момент трения Q путем использования комбинированного подвеса стрелки (опоры в форме керна из твердого сплава и применения компасной жидкости, которая уменьшает давление стрелки на опору, а следовательно, и Q в 25 раз и более). Из выражения aтр следует, что угол застоя зависит от напряженности поля, т. е. будет величиной переменной в разных магнитных широтах. Угол застоя определяет статические погрешности компаса. Для более полной оценки работоспособности компаса на движущемся судне следует знать его динамические характеристики. С этой целью магнитным или железным предметом вначале отклоняют стрелку от магнитного меридиана на угол 40°. Затем магнит убирают и на основании наблюдений строят график затухающих колебаний стрелки. С помощью графика находят фактор затухания f как отношение двух последующих амплитуд:
и период затухающих колебаний Та. Период Td и круговая частота ωd затухающих колебаний связаны зависимостью:
Зная фактор затухания f и период Td затухающих колебаний, можно рассчитать коэффициент затухания по формуле:
и определить соответственно круговую частоту и период незатухающих колебаний стрелки:
Коэффициент затухания и круговая частота незатухающих колебаний связаны с параметрами компаса следующими соотношениями:
где: n - коэффициент пропорциональности, характеризующий вязкое трение среды (жидкости) о стрелку, Н*м*с;
Рисунок 1.1 - Принцип взаимодействия магнитной стрелки с внешним магнитным полем
Магнитный компас
Земной шар является своего рода огромным магнитом с полюсами и магнитной осью. Магнитные полюсы расположены сравнительно недалеко от географических и по аналогии с ними получили наименования северного и южного магнитного полюсов Земли. Положение магнитных полюсов с течением времени медленно изменяется. Магнитная стрелка, свободно подвешенная на вертикальной оси, северным концом (с магнетизмом положительного наименования) ориентируется на северный магнитный полюс Земли. Следовательно, этот магнитный полюс содержит магнетизм отрицательного наименования, а южный магнитный полюс Земли - магнетизм положительного наименования. Поэтому принято считать, что магнитные силовые линии Земли выходят из южного магнитного полюса и сходятся в северном. Хотя в масштабах планеты магнитное поле Земли является неоднородным, в пределах размеров современного судна магнитное поле может рассматриваться как однородное, напряженность Т которого по значению и направлению постоянна. Вектор Т всегда направлен по касательной к силовым линиям (свободно подвешенная стрелка устанавливается по вектору Т). Разложим вектор Т на составляющие в правой горизонтной системе координат по направлениям истинного меридиана X (N), первого вертикала Y (Е) и надира п. Эти составляющие называют элементами земного магнетизма. Кратко охарактеризуем их (рисунок 1.2). l - угол наклона вектора Т к горизонту называется магнитным наклонением. Ему присваивается знак «+», если вектор Т направлен под горизонт, и знак «-», если вектор Т приподнят над горизонтом. Магнитное наклонение может изменяться в пределах (+90)÷(- 90)°. Эти крайние значения магнитного наклонения наблюдаются соответственно на северном и южном магнитных полюсах. Линия, соединяющая точки с нулевым наклонением, называется магнитным экватором. Он представляется в виде плавной кривой линии, проходящей вблизи географического экватора. Магнитное наклонение в теории девиации отождествляется с понятием «магнитной широты», которая также обозначается буквой l. Н - горизонтальная составляющая напряженности является проекцией вектора Т на плоскость горизонта: Н = Tcosl. Направление вектора Н определяет направление магнитного меридиана Nm, а его модуль - действие магнитного компаса. Величина Н изменяется в различных местах земного шара от нуля (на магнитных полюсах) до 32 А*м-1 у южной оконечности Азии, где l≈0.
Рисунок 1.2 - Элементы земного магнетизма
d - угол между географическим (истинным) и магнитным меридианами, называемый склонением. Оно может быть восточным или остовым (+) и западным или вестовым (-). Его значение изменяется в пределах (-180) ÷ (+180)° более или менее равномерно, за исключением четырех точек на земном шаре (географических и магнитных полюсов), в которых это изменение происходит скачкообразно (от -180 до +180°). Z - вертикальная составляющая напряженности магнитного поля Земли, являющаяся проекцией вектора Т на отвесную линию: Z = Tsinl. Вектору Z, направленному к надиру, присваивается знак «+», а направленному к зениту знак «-». Величина Z изменяется от нуля (на магнитном экваторе) до ±56 А*м-1 в полярных районах. Непосредственно из рисунка 1.2 можно установить следующие зависимости между элементами земного магнетизма:
Распределение элементов земного магнетизма на поверхности Земли и их значения отображают на специальных картах с соответствующими изолиниями: изогонами d, изоклинами l и изодинамами Т, Н и Z. В связи с тем что магнитное поле Земли не остается постоянным, а непрерывно изменяется во времени, показанные на картах элементы земного магнетизма приведены к определенной эпохе, а именно на 1 июля года издания карты на 00 ч 00 мин среднего гринвичского времени. Электромеханический компас Гирокомпасомназывается гироскопический навигационный прибор, обладающий направляющим моментом и предназначенный для выработки курса судна и определения направления на земные ориентиры и небесные светила. Помимо основного назначения, гирокомпас используется в качестве датчика для других приборов, устройств и систем, в которых требуется информация о курсе судна, например для автоматического управления курсом судна, ориентации изображения на экране радиолокационной станции, радиопеленгования, автоматического счисления и прокладки. Гирокомпас должен иметь устройство, реагирующее на отклонение отсчетной оси от плоскости истинного меридиана и вырабатывающее управляющий сигнал (или момент) для приведения отсчетной оси в плоскость истинного меридиана. Такое устройство получило название чувствительного элемента(ЧЭ). В чувствительных элементах гирокомпасов используются гироскопы с тремя степенями свободы вращения. При рассогласовании главной оси гироскопа с плоскостью истинного меридиана главная ось видимым образом отклоняется от плоскости горизонта. Если такое рассогласование произошло в западном от истинного меридиана направлении, то северный конец оси опускается, если в восточном, то соответственно поднимается. Это свойство гироскопа используется для формирования управляющего сигнала (или момента) для возвращения главной оси в плоскость истинного меридиана. В зависимости от способа создания момента, управляющего положением главной оси чувствительного элемента относительно плоскости истинного меридиана, различают компасы с непосредственным и косвенным управлением. У гирокомпасов с непосредственным управлениеммомент силы тяжести, возникающий при отклонении главной оси от плоскости горизонта, воздействует непосредственно на чувствительный элемент. Последний имеет маятниковое устройство либо в виде смещенного по вертикальной оси центра тяжести, либо в виде ртутных сосудов, присоединенных к внутреннему кольцу подвеса (к гирокамере). У гирокомпасов с косвенным управлением управляющие моменты формируются с помощью электромагнитных датчиков моментов, получающих сигналы с индикатора горизонта. Погрешности гирокомпасов. По своему характеру погрешности гирокомпаса принято делить на методические и инструментальные. Основными методическими погрешностями являются скоростная и инерционная Скоростной погрешностью гирокомпаса называется постоянное в данной широте азимутальное отклонение оси гирокомпаса от истинного меридиана, происходящее вследствие движения судна с постоянной скоростью на постоянном курсе. Скоростная погрешность имеет полукруговой характер, для курсов северной половины горизонта она отрицательна, южной - положительна. В большинстве конструкций гирокомпасов она исключается автоматическими или полуавтоматическими корректорами. В некоторых конструкциях скоростная погрешность исключается только из показаний принимающих. Инерционные погрешности гирокомпаса вызываются возмущающими моментами сил инерции, возникающими при ускоренном движении судна. При появлении моментов этих сил ось гирокомпаса выходит из своего положения равновесия и совершает прецессионное движение со скоростью, зависящей от значения момента силы инерции. Инерционная девиация проявляется в форме затухающих колебаний после окончания маневра судна (курсом и/или скоростью). Образующаяся в результате маневра переменная погрешность называется инерционной погрешностью гирокомпаса. Она свойственна большинству современных гирокомпасов независимо от их конструкции. Различают инерционную погрешность с выключенным на время маневра успокоителем и инерционную погрешность с включенным успокоителем. Первую иногда называют баллистической погрешностью первого рода, вторую (в частном случае выполнения условия апериодических переходов) - баллистической погрешностью второго рода, или погрешностью ускорения-затухания. Наибольшее значение инерционная погрешность первого рода имеет в момент окончания маневра. Инерционная погрешность второго рода достигает наибольшей величины приблизительно через 20-25 мин после окончания маневра. На практике в условиях часто повторяющихся маневров какие-либо расчеты по определению инерционных погрешностей производить нецелесообразно. Однако судоводитель должен критически оценивать их возможную величину и характер изменения. Инструментальные погрешности гирокомпаса с жидкостным подвесом ЧЭ складываются из инструментальных погрешностей основного прибора, следящей системы, корректирующих устройств, дистанционной передачи и принимающих приборов. Инструментальная погрешность основного прибора современных гирокомпасов обычно не превышает ±0,3°. Погрешность, вносимая следящей системой, практически может рассматриваться как случайная, поскольку она зависит от многих, трудно учитываемых факторов. В гирокомпасах с косвенным управлением основными источниками инструментальных погрешностей основного прибора являются дефекты следящих систем и устройства управления гироскопом. Одногироскопные гирокомпасы с торсионным подвесом могут иметь специфическую установившуюся погрешность, пропорциональную статической ошибке следящей системы. В реальных условиях плавания предельная величина случайной погрешности, которая может быть внесена следящей системой, не превышает ±1,0°. Погрешность, вносимая корректором, складывается из случайной погрешности, вызываемой люфтами и несоответствием геометрических размеров передач, и систематических погрешностей за счет неточного ввода истинной скорости и широты. Случайная погрешность корректора обычно оценивается предельными значениями ±(0,2- 0,3)°. Систематическая погрешность за счет не точного ввода истинной скорости, что может иметь место при неизвестном течении или неизвестной поправке лага, обычно невелика. Систематическая погрешность за счет неточного ввода широты может достигать существенного значения. Для ее уменьшения при плавании в высоких широтах следует производить установку корректора по широте через каждый градус изменения широты или менее. Погрешность за счет дистанционных передач гирокомпаса обычно рассматривается как случайная. Её предельное значение не превышает ±0,2° и статическом режиме, но может достигать нескольких градусов в динамическом режиме, что следует иметь в виду при пеленговании объектов на циркуляции или после резкого изменения курса. Погрешности принимающих приборов могут быть разделены на систематические и случайные. Систематические обычно не превышают ±0,2° (без учета погрешности за счет неточной установки пелоруса). Предельное значение случайных погрешностей имеет такой же порядок. К инструментальным погрешностям двухгироскопных компасов может быть отнесена и наблюдаемая на качке четвертная погрешность (у одногироскопных гирокомпасов с гидравлическим маятником ее следует рассматривать как методическую). Причиной этой погрешности является перемещение ЦТ чувствительного элемента на качке за счет изменения уровня имеющихся внутри него жидких масс, главным образом уровня масла в успокоителе колебаний. Величина этой погрешности зависит от конструкции успокоителя и для отечественных гирокомпасов типа «Курс» не превышает ±0,5° (при отсутствии собственного движения судна). Поправки и точность показаний гирокомпаса.Совокупность перечисленных выше погрешностей образует суммарную погрешность гирокомпаса, подразделяемую на систематическую и случайную составляющие. На практике такое разделение не имеет большого значения, поскольку, как правило, общая поправка определяется при однократных наблюдениях или в течение слишком коротких промежутков времени, чтобы можно было произвести эффективную обработку измерений (Оптимальный интервал между наблюдениями при определении общей поправки гирокомпаса составляв 10-15 мин при общем времени наблюдений 1,5-3 ч). Однако следует иметь в виду, что за счет случайных и переменных систематических ошибок значение общей поправки гирокомпаса в какой либо момент времени может существенно отличаться от значения, выведенного при последних наблюдениях. По этой причине, в частности, при пеленговании объектов в условиях длительного маневрирования или вскоре после окончания маневра (например, после выхода из порта), не следует принимать во внимание общую поправку, определенную до производства маневра (Имеются в виду обычные не апериодические гирокомпасы). С другой стороны, изменение общей поправки в течение некоторого времени после маневрирования не следует считать признаком неисправной работы гирокомпаса. Иногда допускается ошибка, когда общая поправка гирокомпаса определяется на полном ходу с введенным в корректор значением скорости, а затем этой поправкой пользуются на малом ходу, среднем или на стоянке (например, на якоре) без ввода нового значения скорости в корректор. Другая ошибка возникает в тех случаях, когда общая поправка определяется на стоянке, но с установленным на корректоре значением скорости, при этом ошибочно предполагается, что на ходу поправка компаса будет правильной. Во всех случаях следует руководствоваться следующим правилом введенная в корректор скорость должна всегда соответствовать действительной скорости судна. Общая поправка гирокомпаса определяется одним из принятых в навигации и мореходной астрономии методов, а также с помощью радиотехнических средств. Величина средней квадратической погрешности общей поправки гирокомпаса составляет по створам ±0,2°, по пеленгам береговых ориентиров ±0,4°, по небесным светилам ±0,4°. К радиотехническим способам следует прибегать только в тех случаях, когда вследствие плохой или ограниченной видимости другие способы определения поправки недоступны. Особенно ненадежны определения поправки гирокомпаса с использованием ненаправленных радиомаяков, находящихся за пределами оптической видимости. Величина и характер изменения общей поправки гирокомпаса являются критерием точности его показаний. Точность гирокомпаса в соответствии с природой его погрешностей принято оценивать для конкретных целей плавания на неподвижном основании (на швартовах); при плавании прямыми курсами с постоянной скоростью, при маневрировании судна; при качке судна. Допустимые величины суммарных погрешностей гирокомпаса в указанных условиях назначаются для каждого конкретного типа гирокомпаса и зависят от широты плавания.
Спутниковый компас Принцип определения курса в спутниковом компасе. С помощью средне орбитальных навигационных спутниковых систем можно получать информацию не только о координатах и составляющих путевой скорости судна, но также и о его курсе. С этой целью используются двух или трех антенные системы. В принципе для получения курса необходимо только две антенны. Третья антенна позволяет вместе с курсом судна определить углы килевой, бортовой качки и улучшить точность измерения курса, уменьшив негативное влияние на нее качки и рыскания. Вид трех антенной системы представлен на рисунке 1.3 Диаметр окружности, проходящей через антенны А1, А2, А3, приблизительно равен одному метру.
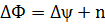
Для освещения принципа определения курса по данным GPS допустим, что имеются только две антенны А1 , А2, расположенные в диаметральной плоскости судна (рисунок 1.3). Расстояние между антеннами обозначим b. У реальных спутниковых датчиков курса оно составляет порядка 85 см. Передача сигналов навигационными искусственными спутниками Земли (НИСЗ) в системе GPS производится на двух частотах: F1=1575,42 и F2=1227,60 MГц. В бортовой аппаратуре GPS для гражданских судов используется только общедоступный С/А-код, которым модулируется частота F1. Длина волны этой несущей частоты составляет приблизительно 19 см. При позиционных определениях по координатам судна и по эфемеридам спутников всегда могут быть рассчитаны горизонтные координаты НИСЗ: высота hS и азимут AS. На рисунке 1.4 эти координаты показаны для одного из спутников. Дистанции, которые проходит сигнал с определенного спутника до антенн А1, А2, отличаются на величину ΔD. Эту разность расстояний можно найти, измерив сдвиг фаз ΔФ несущего сигнала, принимаемого антеннами А1, А2:
где n - целое число циклов, Δψ - дробная часть цикла. Фазовым измерениям присуща многозначность, поэтому измеряется только Δψ, а n должно быть определено по дополнительным данным. По значению ΔФ величина ΔD находится по формуле:
где λ - длина волны несущего сигнала. Зная ΔD и высоту hS спутника над истинным горизонтом, можно найти курсовой угол qS спутника и истинный курс судна К:
Значения курса определяются по всем спутникам, находящимся над горизонтом, и усредняются. Для вычисления координат объекта по навигационным сигналам спутников GPS в трехмерном пространстве необходимо измерить дистанции не менее чем до 4-х, а при двухмерной навигации - не менее чем до 3-х спутников. Для получения добавочно к координатам истинного курса объекта, число спутников, до которых измеряются расстояния, должно быть на один больше, так как количество определяемых параметров увеличивается на единицу. Кроме координат и постоянной погрешности расстояния здесь требуется также найти значение целого числа циклов n.
Для случаев, когда сигналы спутников GPS могут быть блокированы высокими зданиями, или мостами, под которыми проходит судно, спутниковый компас снабжается свободным гироскопом. По параметрам углового положения его оси обеспечивается выработка значений курса в те короткие промежутки времени, когда не поступают сигналы от спутников. Кроме того, названный гироскоп применяется для уменьшения влияния качки и рыскания на точность показаний курса. В периоды отсутствия сигналов НИСЗ вместо данных свободного гироскопа в спутниковом компасе для хранения курса может использоваться информация электронного магнитного курсоуказателя. Состав аппаратуры спутникового компаса и его характеристики. В комплект спутникового компаса входит: - три антенны, помещенные на жесткой с высокой точностью установленной платформе; - основной модуль; - устройство управления и отображения. В основном модуле располагаются приемник GPS, свободный гироскоп, процессор. Спутниковый компас предоставляет информацию о координатах судна, курсе, путевом угле, путевой скорости, углах бортовой и килевой качки. По существу он является датчиком параметров кинематического состояния судна. Устройство управления и отображения спутникового компаса фирмы “Furuno” показано на рисунке 1.5. Этот курсоуказатель может отображать данные в трех формах, предназначенных для: - управления судном рулевым (курс, подвижная картушка с неподвижным индексом курса, путевая скорость, путевой угол, углы килевой и бортовой качки); - навигационных целей (дата, время, координаты места судна, путевая скорость и путевой угол); - указания направления диаметральной плоскости судна (дата, время, курс, путевая скорость и путевой угол). Спутниковый компас способен передавать информацию о курсе судна в такие устройства, как РЛС, САРП, авторулевой, транспондер АИС, ЭКДИС и в другую аппаратуру. Он имеет такие характеристики: - Средняя квадратическая погрешность (СКП) показаний курса - ±0.50; - СКП показаний угла бортовой (килевой) качки - ±0.50; - Точное слежение за курсом при скорости поворота - до 25 0/с; - Время прихода в готовность после включения - 4 мин; - 95% погрешность определения места судна по GPS - ±10 м; - Интерфейс - МЭК 61162.
Рисунок 1.5 - Отображения компаса фирмы “Furuno ”
Другая бортовая аппаратура GPS подобного вида, приемоиндикатор NR230MII фирмы Sercel, обеспечивает точность показаний курса от 0.03 до 0.10, а углов бортовой и килевой качки - от 0.08 до 0.20. Время прихода в готовность этого приемоиндикатора занимает 1÷3 мин. Обновление показаний координат в приемоиндикаторе NR230MII производится через 0.6с., а углов курса, килевой и бортовой качки - через 0.1 или 0.6 с. На работу спутникового компаса не влияют скорость судна, ускорения, изменение широты, геомагнетизм. Этот компас имеет малую стоимость и не требует обслуживания. Фиброоптические гирокомпасы В настоящее время на смену классическим ГК приходят более совершенные приборы, основанные на современных технологиях и исключающие использование кардановых подвесов (стабилизируемых в плоскости горизонта платформ). Такие новые датчики курса имеют чувствительные элементы, жестко связанные с корпусом судна. Движущиеся части в них отсутствуют. Бесплатформенные гирокомпасы и другие измерительные устройства, в которых нет движущихся частей, более надежны, потребляют мало энергии, требуют незначительного ухода или вообще не нуждаются в обслуживании. Технологии производства таких приборов получили в англоязычной литературе название «strapdown technologies». В ряде современных образцов ГК применены оптические кольцевые лазерные гирометры (RLG - Ring Laser Giroscope), называемые также фиброоптическими (волоконнооптическими) гиродатчиками - ФОГ (FOG - Fiber Optic Giroscope). Фиброоптические ГК уже установлены на нескольких морских судах. Следует отметить, что система с тремя ФО-гирометрами, дополненная тремя акселерометрами может служить датчиком кинематического состояния судна, который измеряет: курс, крен, дифферент, продольное, поперечное и вертикальное перемещение корпуса. Принцип определения курса. В фиброоптическом ГК нахождение курса сводится к определению горизонтальной проекции ΩN вектора угловой скорости вращения Земли Модуль и направление вектора Положение горизонтальной плоскости (или вертикального направления, что одно и то же) может быть найдено разными способами: применением отвеса, с помощью электролитического уровня, путем определения вектора силы тяжести по данным двух акселерометров и т.д. Все эти датчики являются двух координатными.
Для расчетов вертикального направления может использоваться и трех координатный датчик - система из трех акселерометров с взаимно ортогональными осями. Чтобы в фиброоптическом ГК рассчитать курс с погрешностью 0,50secφ, угловую скорость Земли необходимо измерить с высокой точностью - 0,10/час, а ускорение силы тяжести - с относительно низкой для современных акселерометров ошибкой 0,01g. На судне реализация охарактеризованного принципа определения курса затрудняется следующими обстоятельствами. Здесь к вращению Земли и к ускорению силы тяжести добавляются угловые и линейные параметры движения судна. Вследствие этого оказывается необходимым из результатов измерений выделять В современных фиброоптических ГК вектора Фиброоптические ГК относят к системам аналитического типа, так как курс в них получается в результате сложной математической обработки данных. Принцип работы фиброгирометров. Принцип работы фиброгирометров основан на инвариантности скорости света и релятивистском эффекте, открытым французским физиком Г. Саньяком в 1913 г. Положение об инвариантности скорости света состоит в ее независимости от движения замкнутой среды, в которой свет распространяется. Это положение учитывает, что к распространению света неприменим закон классической механики о сложении скоростей. Для ясного понимания эффекта Г. Саньяка необходимы хорошие знания специальной теории относительности. Поэтому поясним принцип работы фиброгирометров не строго, а в популярной форме. Допустим (рисунок 1.8 а), что в плоскости инерциального пространства с системой координат Oζξ имеется неподвижный фиброоптический кабель (световод) длиной L, свернутый в виде кольца радиусом R (L=2πR). Примем, что начало и конец кабеля находятся в точке А. Если в точку А подать свет, то его волна разделится на две. Эти две волны пойдут по оптическому кабелю в противоположных направлениях (будем считать, что первая волна - по часовой стрелке, а вторая - против нее). Обойдя световод, первая и вторая волны встретятся в точке А. Здесь они соединятся и покинут кабель. Время прохождения светом кольцевого пути будет равно:
где с - скорость света.
Рисунок 1.8 - Принципа работы ФО-гирометра
За время обхода кабеля первой и второй волнами света он повернется на угол θ, примерно равный:
Расстояние до точки А, проходимое первой волной, огибающей световод по часовой стрелке, будет равно: L1=L+Rθ (1.15) Длина пути до точки А второй волны, движущейся по кабелю в противоположном направлении, окажется такой: L2=L-Rθ (1.16) Разность расстояний, проходимых первой и второй волнами света, составит ΔL:
Обозначим длину световой волны λ. Ей соответствует фазовый угол 2π. Тогда величине ΔL при выходе света из кабеля в точке А будет соответствовать фазовый сдвиг ΔФ между первой и второй волнами, равный:
Угол ΔФ называют фазой Саньяка. Из формулы следует, что чем больше длина световода, тем с лучшей точностью можно измерить его угловую скорость (значению ω будет соответствовать большее значение ΔФ). Поэтому длину оптического кабеля берут равной 500 и более метров и наматывают его в виде катушки, диаметром порядка 6÷12 см. На практике в световоде поддерживаются автоколебания генерируемой электромагнитной энергии в оптическом диапазоне, а определение разности между L1 и L2 выполняется с помощью интерферометров, измеряющих разность фаз между первой и второй световыми волнами. Характеристики фиброоптических гирокомпасов. Морские фиброоптические компасы изготавливаются в настоящее время рядом фирм и организаций. В качестве примера таких приборов можно привести гирогоризонткомпас ГГК-1, разработанный Пермской научно-производственной приборостроительной компаний (Россия), курсоуказатель «NAVIGAT 2100» (SR 2100) фирмы C.Plath и датчик курса «LFK 95» фирмы LITEF. Характеристики этих приборов практически одинаковы, поэтому рассмотрим их на примере курсоуказателя «NAVIGAT 2100».
Компас «NAVIGAT 2100» изготовлен по strapdown-технологии и не имеет движущихся частей. Он включает в себя основной прибор, блок питания и интерфейса, модуль управления и отображения (рисунок 1.8). В основном приборе находятся: три фиброоптические гирометра, два электронных датчика для определения направления вертикали, процессор. Длина световода в гирометре равна 500 м. В процессоре при обработке данных гирометров и датчиков горизонта используется фильтр Калмана. Размеры основного прибора составляют 29х34х17 см3. Вес прибора равен 11.5 кг. Блок питания и интерфейса вырабатывает необходимые питающие напряжения. Он обеспечивает передачу показаний прибора на авторулевой и другим потребителям, а также ввод данных от другого гирокомпаса, от приемоиндикатора GPS, электронного магнитного компаса, лага, датчика положения руля. Блок питания и интерфейса имеет размеры 52х34х12 см3 и вес 15 кг. Блок управления и отображения служит для управления работой прибора и представления его информации. Размеры этого прибора: 29х10х5,5 см3. Вес - 0,7 кг. При всех условиях работы (в широтах до ±750 и скоростях хода до 75 узлов) фиброгирокомпас «NAVIGAT 2100» обеспечивает точность: - Курса …………..........……………………………………...≤0.70secφ; - Углов бортовой и килевой качки ……………………………. ≤0.50; - Скорости поворота судна.....................................................≤0.40/мин; - Угловых скоростей бортовой и килевой качки………….≤0.40/мин. После включения время прихода ГК в готовность составляет: у причала - 30 мин, на ходу - 45 мин. Требуемая точность измерения скорости поворота судна достигается через 4 минуты после включения компаса. Отметим также следующие достоинства рассматриваемого прибора. фиброгирокомпас «NAVIGAT 2100» не имеет движущихся частей, обладает высокой надежностью, потребляет мало энергии, не требует обслуживания, отвечает рекомендациям ИМО к высокоскоростным судам. Он является датчиком курса, скорости поворота, углов и скоростей килевой и бортовой качки и относится к бесплатформенным системам ориентации (БСО). Этот компас имеет цифровые и аналоговые выходы и встроенную систему контроля своей работы. Основные преимущества электронных компасов. В заключение выделим следующие основные достоинства электронных компасов различных видов, изготовленных по strapdown-технологии: |
|
 и
и  . При отклонении магнита от меридиана на угол, а пара сил создает вращающий момент L, который называют также направляющим моментом. Вращающий момент L выражается произведением одной из сил на плечо а пары:
. При отклонении магнита от меридиана на угол, а пара сил создает вращающий момент L, который называют также направляющим моментом. Вращающий момент L выражается произведением одной из сил на плечо а пары:  , где а=2sina. Помня, что 2lm ≈ М, окончательно получим:
, где а=2sina. Помня, что 2lm ≈ М, окончательно получим: (1.1)
(1.1) - магнитная постоянная, характеризующая магнитное поле в вакууме:
- магнитная постоянная, характеризующая магнитное поле в вакууме: ;
; .
. (1.2)
(1.2) (1.3)
(1.3) (1.4)
(1.4) (1.5)
(1.5) (1.6)
(1.6) (1.7)
(1.7)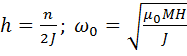 (1.8)
(1.8)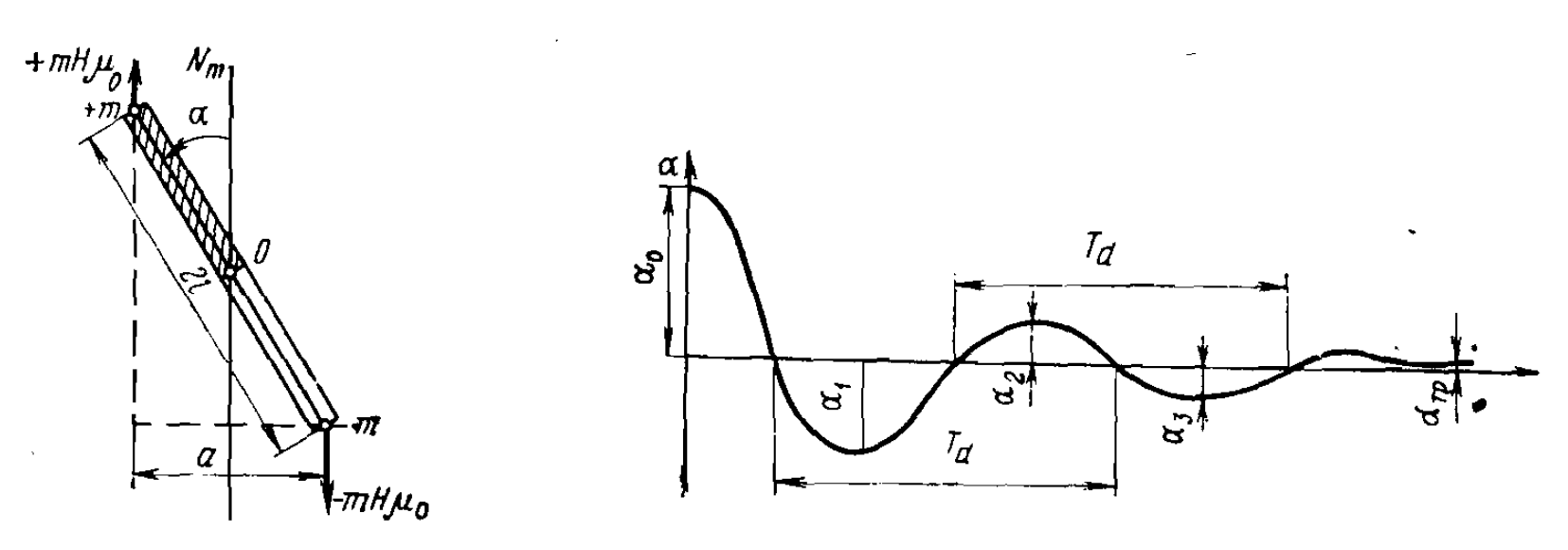
 (1.9)
(1.9)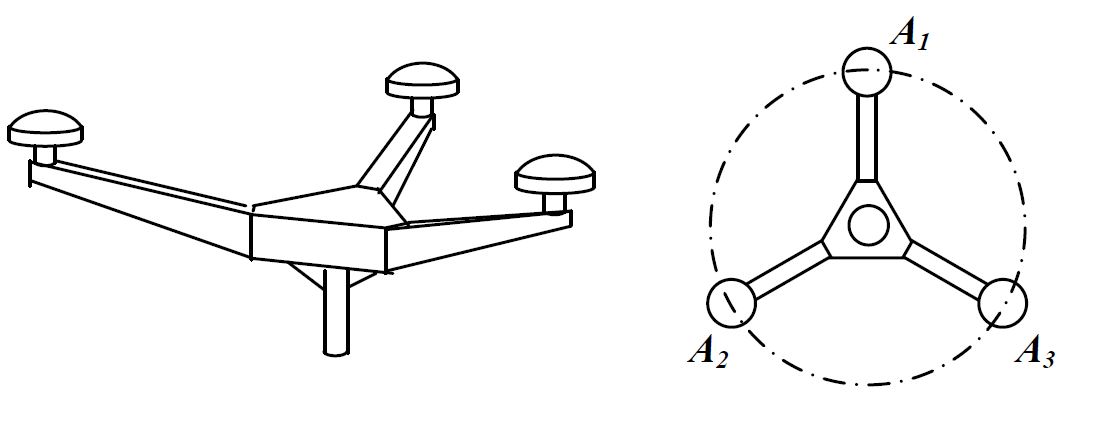
 (1.10)
(1.10) (1.11)
(1.11) (1.12)
(1.12)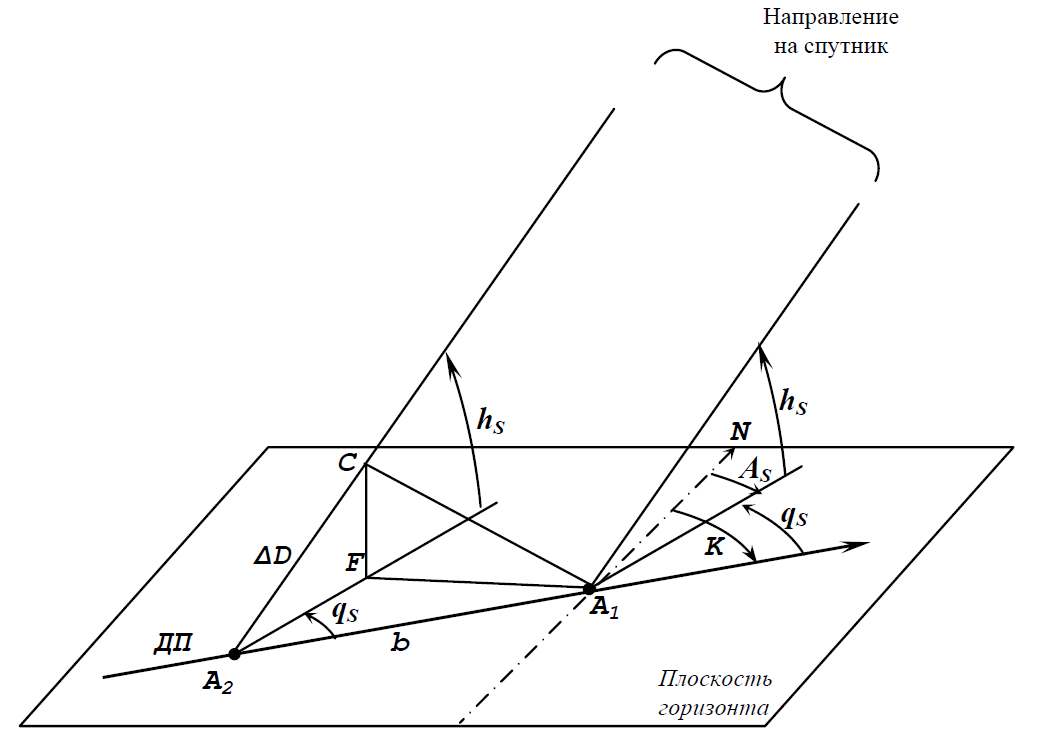
 которая указана на рисунке 1.6.
которая указана на рисунке 1.6.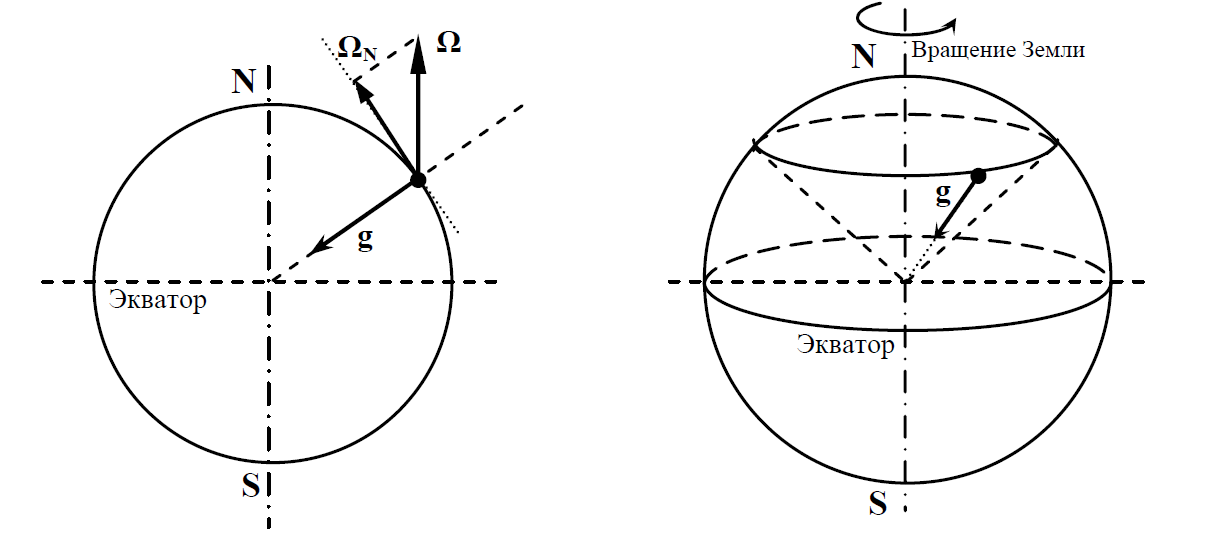
 . Это сложная задача, так как
. Это сложная задача, так как  (1.13)
(1.13)
 (1.14)
(1.14) (1.17)
(1.17) (1.18)
(1.18)