|
|
Классификация кинематических парПару называют низшей, если элементы звеньев соприкасаются только по поверхности, и высшей, если только по линиям или в точках. При этом линейный или точечный контакт понимается как первоначальный — при соприкосновении звеньев без усилия, — а под нагрузкой звенья, образующие высшую пару, будут, соприкасаться по некоторой фактической поверхности, называемой пятном контакта. Кинематические пары классифицируют по числу Н степеней свободы в относительном движении звеньев (подвижность пары) и по числу S условий связи (ограничений), накладываемых парой на движение одного звена относительно другого (по И. И. Артоболевскому) [I]. При этом предполагается, что все связи – геометрические, налагающие ограничения только на координаты точек звена, входящего в кинематическую пару, в его, относительном движении. Так как для свободного тела в пространстве число степеней свободы равно шести, то величины Н и S связаны соотношением: Н=6–S, где S= 1,2,3,4 или 5. При S=0 пары не существует, а имеются два тела, движущихся независимо друг от друга; при S=6 кинематическая пара становится жестким соединением деталей, т. е. одним звеном. По величине S определяют класс кинематической пары: различают одноподвижные пары (V класса, Н=1, S=5), двухподвижные (IV класса, Н=2, S=4), трехподвижные (III класса, Н=3, S=3), четырехподвижные (II класса, Н=4, S=2) и пятиподвижные (I класса, Н=5, S=1). Основные виды механизмов Механизмы классифицируют по различным признакам, и в первую очередь их делят на механизмы с низшими и высшими парами; те и другие могут быть плоскими и пространственными. Плоским называется механизм, все подвижные точки которого движутся в параллельных плоскостях. Механизм является пространственным, если подвижные точки его звеньев описывают неплоские траектории или траектории, лежащие в пересекающихся плоскостях. Примеры механизмов. Рычажными называют механизмы, в которые входят жёсткие звенья, соединённые между собой вращательными и поступательными парами. Простейшим, наиболее распространённым рычажным механизмом является шарнирный четырёхзвенник. Частным случаем шарнирного четырёхзвенника является кривошипно-ползунный механизм. Кривошипно-кулисные механизмы также находят широкое применение в машиностроении.
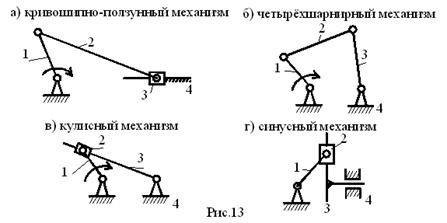
Рис. Схемы рычажных четырёхзвенных механизмов
В этих механизмах встречаются однотипные звенья: кривошип – звено, совершающее полнооборотное вращательное движение вокруг неподвижной оси; коромысло – звено, совершающее неполнооборотное вращательное движение вокруг неподвижной оси; ползун – звено, совершающее поступательное движение относительно стойки; камень – звено, совершающее поступательное движение относительно подвижной направляющей, называемой кулисой; шатун – звено, совершающее плоскопараллельное движение. В кулачковых плоских и пространственных механизмах высшая пара образована звеньями, называемыми – кулачок и толкатель. Замыкание высшей пары может быть силовое (например, пружиной) или геометрическое (ролик в пазу кулачка). Форма входного звена – кулачка определяет закон движения выходного звена - толкателя. Для уменьшения трения о поверхность кулачка выходное звено часто снабжают роликом.
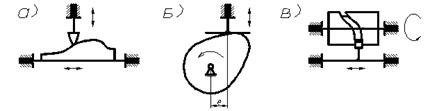
Рис. Кулачковые механизмы с силовым замыканием а – силой тяжести; б – силой упругости пружины
Рис. Кулачковый механизм с геометрическим замыканием
Рис. Кулачковые механизмы: а – с поступательным движением кулачка; б – с тарельчатым толкателем; в – пространственный
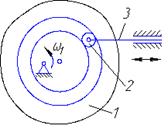
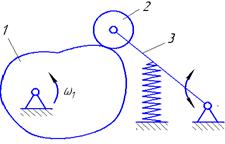
Кулачковые механизмы применяются в машинах автоматах, прядильных машина, ДВС, и т.д. и обеспечивают функции “жёсткого” управления выполняемым процессом. В фрикционном механизме передача вращательного движения осуществляется посредством трения между звеньями, образующими высшую пару. Простейший фрикционный механизм состоит из двух вращающихся цилиндров и стойки. Силовое замыкание высшей пары осуществляется пружинами. Фрикционные механизмы используют в вариаторах для плавного бесступенчатого изменения скорости вращения выходного звена. Зубчатые механизмы относятся к механизмам с высшими парами. Движение передаётся при помощи зубчатых колёс, закреплённых на валах передачи. Различают внешнее, внутреннее и реечное зацепление. Круглые колёса работают с постоянным передаточным отношением, а переменное передаточное отношение может быть получено при помощи некруглых (эллиптических, сердцевидной формы и т. п.) колёс. Винтовые механизмы содержат винтовые пары (винт и гайку). Клинчатые механизмы включают поступательно перемещающиеся взаимодействующие клинья и стойку. Мальтийский механизм преобразует непрерывное вращение входного звена – кривошипа 1 в прерывистое (с остановками) вращение выходного звена – креста 2 (рис. ).
Храповой механизм служит для преобразования возвратно-вращательного движения балансира 1 в прерывистое вращательное движение (в одном направлении) храпового колеса 2. Качающаяся собачка А сообщает вращение храповому колесу только при движении балансира в одну сторону. Для удержания храпового колеса от обратного самопроизвольного его вращения служит стопорная собачка В. Механизмы с гибкими связями – ременные и цепные. Механизмы с гидравлическими и пневматическими устройствами.
|
|
 а
а
 б
б