|
|
Основные кинематические и силовые параметры передач вращательного движения
Скорость вращения можно характеризовать угловой скоростью ω, измеряемой в рад/с=1/с=с-1, или частотой вращения п, измеряемой в об/мин=1/мин=мин-1, причём,
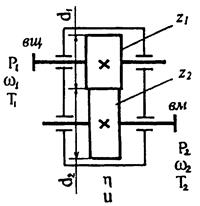
Угловая скорость ω и частота вращения п характеризуют движение звена, как единого целого. Условная механическая передача показана на рисунке 4.1. Передаточным отношением механической передачи называется отношение угловой скорости ведущего звена ω1 к угловой скорости ведомого звена ω2. (или отношение их частот вращения n1 к n2)
Окружная скорость точки звена v, м/с,
где d/2, – расстояние точки от оси вращения, м; ω – угловая скорость данного звена, с-1. Если в этой точке к звену приложена сила F, то окружная составляющая данной силы Ft передаёт звену мощность, Вт,
где A – работа силы, Дж; t – время совершения работы, с; T – вращающий момент, Н∙м.
Мощность, подводимая к ведущему звену
Мощность, отбираемая у ведомого звена
Для механизма передачи T1 является моментом движущих сил, а T2 – моментом сил полезного сопротивления. Внутри передачи движение от звена к звену передают взаимно уравновешенные силы взаимодействия звеньев. В кинематических парах, образованных подвижными звеньями между собой и с неподвижным звеном – стойкой возникают силы трения. Вместе с сопротивлением перемешиванию масла и сопротивлением воздуха они составляют силы вредного сопротивления. В установившемся режиме движения механизма работа движущих сил
где AП.С – работа сил или моментов полезного сопротивления; AВ.С – работа сил или моментов вредного сопротивления. (При разгоне AД> AП.С+ AВ.С, а при замедлении AД< AП.С+ AВ.С) Отношение работы сил полезного сопротивления AПС к работе движущих сил AД называется коэффициентом полезного действия η. Вместо отношения работ можно взять отношение средних мощностей за время t. Общий КПД передачи
В проектных расчётах общий КПД передачи определяют по формуле
где η – КПД собственно передачи, например, зубчатого зацепления, выбирают по справочнику в зависимости от типа передачи, степени точности её изготовления и условий смазки; ηП – КПД пары подшипников, на которые опирается вал, принимают (0,99…0,995) для пары подшипников качения и (0,98…0,99) для пары подшипников скольжения; n – число последовательно расположенных пар подшипников (валов) передаточного механизма. КПД механизма всегда меньше единицы, т.к. в реальных условиях работа сил вредных сопротивлений не может быть равной нулю. КПД передачи и механизма в целом равен нулю в режиме холостого хода, потому что при этом АП.С=0.
Рисунок 4.1 – Обозначение параметров передач
Геометрические, кинематические, силовые и энергетические параметры передачи взаимосвязаны. Чтобы однозначно задать кинематическую и силовую характеристику передачи, достаточно указать четыре независимых параметра. Например, мощность на входе Р1, кВт, частоту вращения входного звена n1, об/мин, передаточное отношение i, КПД ηОБ. (Значение КПД можно найти по справочнику, зная тип передачи и подшипников). Тогда кинематический и силовой расчёт передачи проводится в следующем порядке: находят частоту вращения ведомого вала, мин-1,
крутящий момент на ведущем валу, Нм
крутящий момент на ведомом валу, Нм
При i >1, ω1>ω2 — передача понижающая (вращающий момент увеличивается). При i<1, ω1<ω2 — передача повышающая (вращающий момент уменьшается). В передачах зацеплением отношение большего числа зубьев к меньшему в паре зацепляющихся звеньев называют передаточным числом u≥1. В понижающих передачах z1< z2 и i=u, в повышающих передачах z1> z2 и i=1/u.
Классификация передач Передачи классифицируют по принципу действия (таблица 4.1). Таблица 4.1 – Классификация передач по способу передачи движения от ведущего звена к ведомому
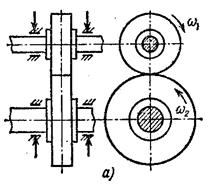
Фрикционные передачи Передаточное число фрикционной передачи
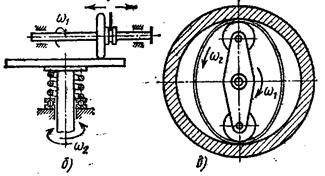
где D1, D2 – диаметры катков, e – коэффициент скольжения, v1, v2 – линейные скорости в точке контакта. Принцип передачи движения силами трения позволяет создавать вариаторы – передачи с бесступенчатым (плавным) регулированием скорости. Пример – на рис. 4.2 (б) – лобовой вариатор. В вариаторах i – величина переменная, и их характеристикой является диапазон регулирования
Фрикционные передачи рассчитывают на прочность по контактным напряжениям (Формулы 3.27 – 3.32).
Рисунок 4.2 – Передачи трением с непосредственным контактом: а) – фрикционная с условно постоянным передаточным отношением; б) – фрикционная с переменным передаточным отношением и реверсированием; в) – волновая фрикционная
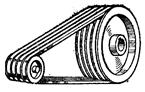
Рисунок 4.3 – Передача клиновыми ремнями (клиноременная)
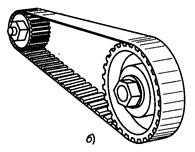
а) Рисунок 4.4 – Передачи зацеплением с гибкой связью: а) – цепная; б) – зубчатоременная
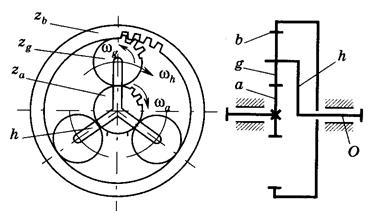
По характеру движения различают передачи с неподвижными осями колёс, и планетарные (рисунок 4.5), в которых имеются колёса (сателлиты), вращающиеся подобно планетам одновременно вокруг своей геометрической подвижной оси и вместе с ней – вокруг неподвижной оси центрального колеса.
Рисунок 4.5 – Зубчатая планетарная передача: a, b – центральные колёса: a – солнечное, b – опорное – с внутренним зацеплением; g – сателлиты; h – водило – вращающееся звено, на котором закреплены оси сателлитов; O – центральная ось вращения; ωa, ωg, ωh – угловые скорости вращения центрального колеса, сателлита и водила; za, zg, zh – числа их зубьев
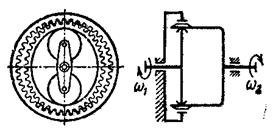
Механизмы с планетарными передачами могут использоваться как дифференциалы, которые имеют две степени подвижности. Например, в передаче, изображённой на рисунке 3.5, можно сделать вращающимся колесо b. Дифференциальные передачи используют когда необходимо суммировать два движения или распределять движение на два ведомых вала в определённом отношении. Преимущества планетарных передач при наличии двух и более сателлитов: меньшие габаритные размеры и масса, т.к. вращающий момент передаётся по нескольким потокам; большие передаточные отношения в одной ступени; меньшие поперечные силы действуют на валы. Недостатки: требуется повышенная точность изготовления и сборки; при больших передаточных отношениях снижается КПД. У волновой передачи одно из колёс выполнено в виде упругого тонкостенного стакана с внешними зубьями. Оно находится внутри другого зубчатого колеса – жёсткого с внутренними зубьями. Шаг зубьев на этих колёсах одинаковый, но число зубьев гибкого колеса меньше, чем жёсткого, на 1, 2, 3 или 4. Чтобы обеспечить зацепление, гибкое колесо деформируют генератором волн, образуя количество областей зацепления равное или кратное разности чисел зубьев. Чаще всего используют передачи с разностью чисел зубьев, равной двум, и таким же числом волн (рисунок 4.6). Генератор волн может быть выполнен как водило, на концах которого вмонтированы два шарикоподшипника (рисунок 4.6), или как профилированный кулачок с гибким подшипником. Вращаясь, генератор волн последовательно вводит зубья в зацепление. После одного оборота генератора волн данный зуб гибкого колеса входит не в ту же впадину зубьев жёсткого колеса, а во впадину, находящуюся на расстоянии двух шагов зубьев в сторону, противоположную направлению вращения генератора волн. Таким образом, гибкое колесо (с числом зубьев zg=160…600) поворачивается относительно жёсткого колеса гораздо медленнее, чем генератор волн.
Рисунок 4.6 – Схема зубчатой волновой передачи: ω1 – угловая скорость ведущего звена – генератора волн; ω2 – угловая скорость ведомого звена – гибкого колеса
Преимущества волновых передач: большие передаточные числа (80…300) при малых габаритах и массе, высокая кинематическая точность, малые нагрузки на валы, возможность передачи движения в герметизированное пространство без дополнительных уплотнений (рисунок 4.7). Недостатки: сложность изготовления и недостаточная долговечность гибкого колеса.
Рисунок 4.7 – Зубчатая волновая герметичная передача: А, Б – две среды, разделённые герметично; 1 – ведущий вал; 2 – стенка; 3 – гибкое колесо в виде глухого стакана, неподвижно и герметично прикреплённого к стенке 2; 4 – жёсткое колесо; 5 – генератор волн; 6 – ведомый вал, соединённый с жёстким колесом 4.
Волновые передачи широко применяются в приводах кратковременного действия в химической, атомной и космической технике, в механизмах промышленных роботов и приборов, различных образцах строительной техники. Из передач с перекрещивающимися осями (рисунок 4.8) наибольшее распространение получили червячные передачи. Винтовые передачи применяют преимущественно в приборах, а гипоидные – в тракторах.
По характеру изменения скорости передачи делят на понижающие и повышающие. По взаимному расположению входного и выходного валов передачи вращательного движения могут быть с параллельными, пересекающимися, перекрещивающимися или соосно расположенными осями вращения. По конструктивному оформлению передачи могут быть открытые (не имеющие общего закрывающего их корпуса) и закрытые (заключённые в общий корпус, обеспечивающий защиту от пыли и постоянную смазку передачи). По числу ступеней, т.е. отдельных передач, последовательно преобразующих механическую энергию, различают одноступенчатые и многоступенчатые передачи. Передача, в которой энергия с входного на выходное звено передаётся через несколько параллельно расположенных механизмов, называется многопоточной передачей. К таким передачам относятся также разветвлённые передачи – приводы от одного двигателя нескольких исполнительных механизмов.
Редуктором называют агрегат (механизм, заключённый в корпус), содержащий передачи зацеплением с постоянным передаточным отношением и предназначенный для понижения скорости вращения и увеличения вращающего момента. Такой же агрегат, но соединённый тихоходным валом с двигателем, называют мультипликатором.
Зубчатые передачи
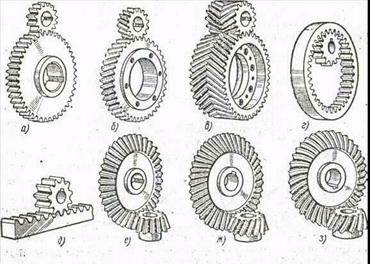
В современном машиностроении и приборостроении наиболее распространенным типом механических передач являются зубчатые передачи. В этих передачах движение передается с помощью зацепления пары зубчатых колес (рисунок 4.9). Меньшее из зубчатых колес сцепляющейся пары называется шестерней, а большее – колесом. Термин «зубчатое колесо» относится как к шестерне, так и к колесу. Из всех видов передач зубчатые имеют наименьшие габаритные размеры и потери на трение. Зубчатые передачи используют при мощностях, начиная от ничтожно малых (в приборах) до измеряемых десятками тысяч киловатт. На рисунке 4.9 (а – г) – цилиндрические, (д) – реечная, (е –з) – конические зубчатые передачи. У цилиндрических передач оси колёс параллельны, у конических – пересекаются (обычно под прямым углом). Для валов с перекрещивающимися осями применяют зубчатовинтовые (гиперболоидные) передачи (см. рисунок 4.8). В зависимости от формы профиля зуба передачи бывают эвольвентные, циклоидальные и с зацеплением Новикова. К преимуществам зубчатых передач относится: 1. Высокая надежность работы в широком диапазоне скоростей и нагрузок. 2. Малые габаритные размеры. 3. Большая долговечность (до 30 - 40 тыс. часов). 4. Высокий к.п.д. (до 0,97 - 0,98). 5. Сравнительно малые нагрузки на валы и подшипники. 6. Постоянство передаточного отношения. 7. Простота обслуживания. К недостаткам зубчатых передач относится: 1. Относительно высокие требования к точности изготовления и монтажа. 2. Невозможность плавного изменения передаточного отношения. 3. Шум при повышенных скоростях. 4. Большая жесткость, не позволяющая компенсировать динамические нагрузки
Рисунок 4.9 – Зубчатые передачи. Цилиндрические передачи с внешним зацеплением: прямозубая (а); косозубая (б); шевронная (в). Цилиндрическая передача с внутренним зацеплением (г). Реечная передача (д). Конические передачи: прямозубая (е); косозубая (ж); с круговым зубом (з)
|
|
 .
.
 .
.
 ,
,
 ,
,
 .
.
 ,
,
 ,
,
 ,
,
 .
.
 ,
,
 ;
;
 ;
;
 ,
,
 ,
, 



 а)
а)  б)
б) в)
в)